PhotoRobot 시스템으로 이미지 캡처
PhotoRobot 컨트롤 앱("CAPP"라고도 함)에서 작업 영역을 만든 후 캡처 인터페이스는 이미지 및 비디오 캡처를 자동화하기 위해 PhotoRobot 하드웨어 및 카메라에 대한 사용자 제어 권한을 부여합니다.
캡처 인터페이스
CAAP 캡처 인터페이스는 4가지 주요 영역으로 구성됩니다.
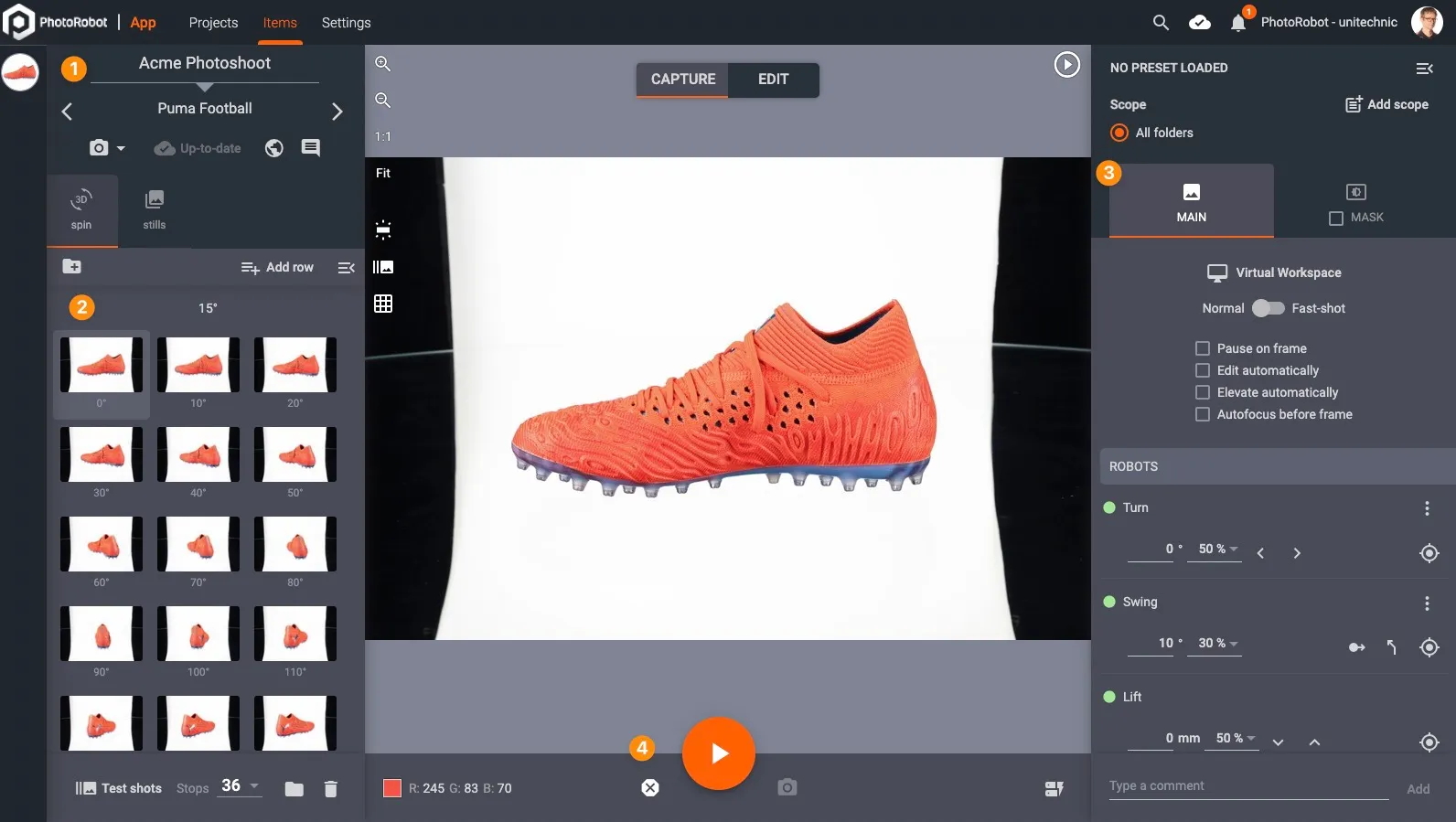
- 품목 정보
- 폴더, 프레임 및 이미지
- 하드웨어 구성
- 시퀀스 제어
새 항목 만들기
CAPP에서 프로젝트는 하나 이상의 단일 항목으로 구성될 수 있지만 항목은 일반적으로 특정 촬영 개체입니다. 그런 다음 항목에 하나 이상의 폴더를 포함하여 서로 다른 유형의 이미지를 별도로 유지할 수 있습니다. 가장 일반적인 예는 360도 회전("Spin")을 위한 폴더를 지정하고 스틸 이미지("Stills")를 위한 다른 폴더를 지정하는 것입니다.
사진 촬영을 시작하기 전에 새 프로젝트를 추가하고(기존 프로젝트를 사용하지 않는 한) 항목이 하나 이상 있어야 합니다.
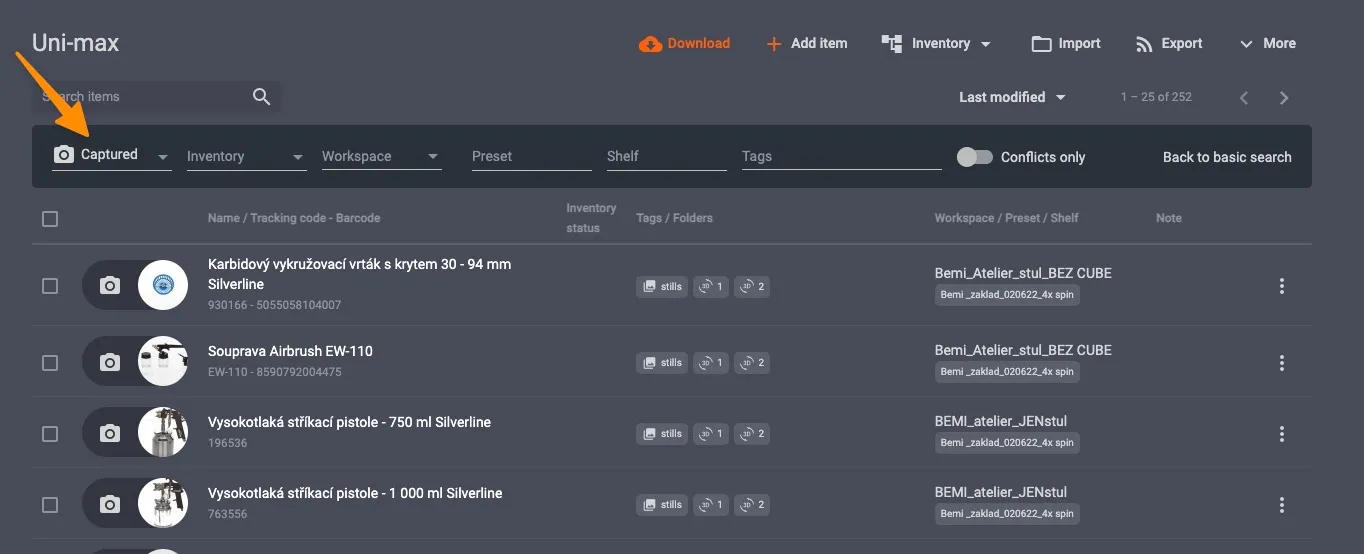
새 항목을 수동으로 만들려면 프로젝트 로 이동하여 항목 추가를 선택합니다.
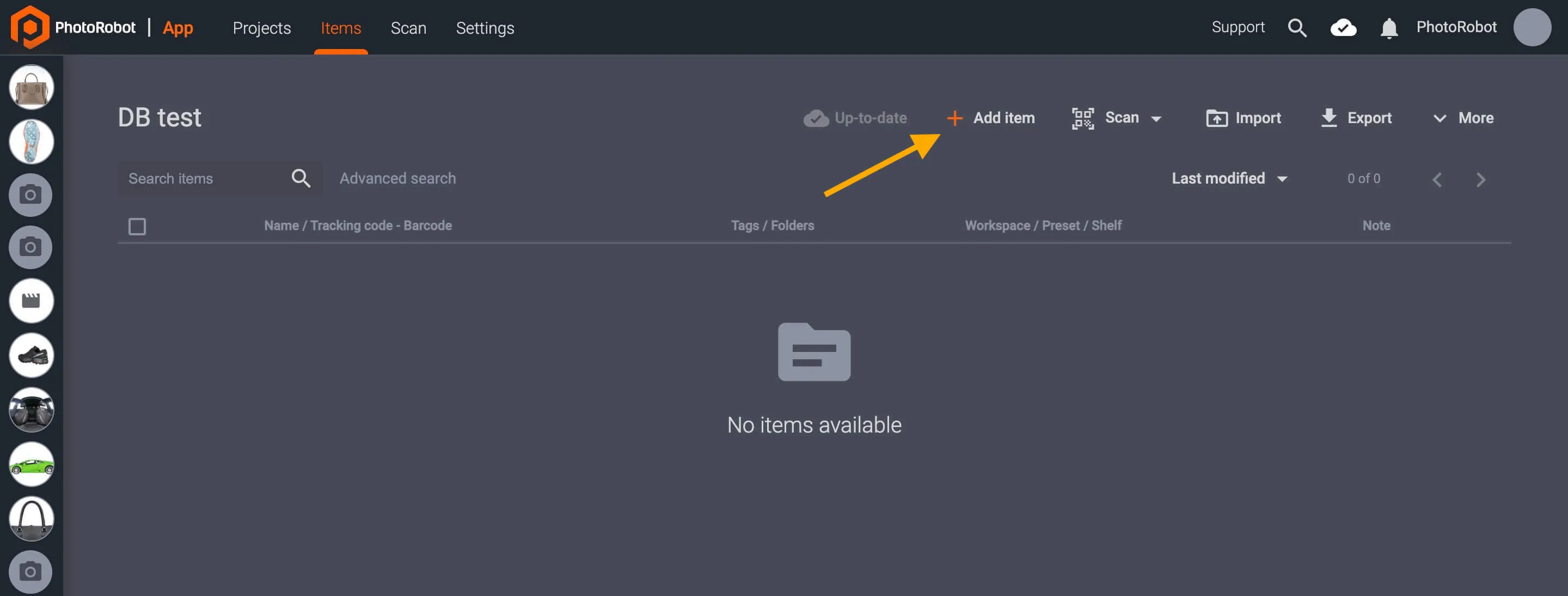
그런 다음 나타나는 창에서 필수 이름 필드를 완료하면 추가 버튼을 사용하여 새 항목을 만들 수 있습니다. 여기에는 코드, 링크, 메모, 매크로 등 더 많은 항목 정보를 입력할 수 있는 옵션도 있지만 이러한 필드는 선택 사항일 뿐입니다.
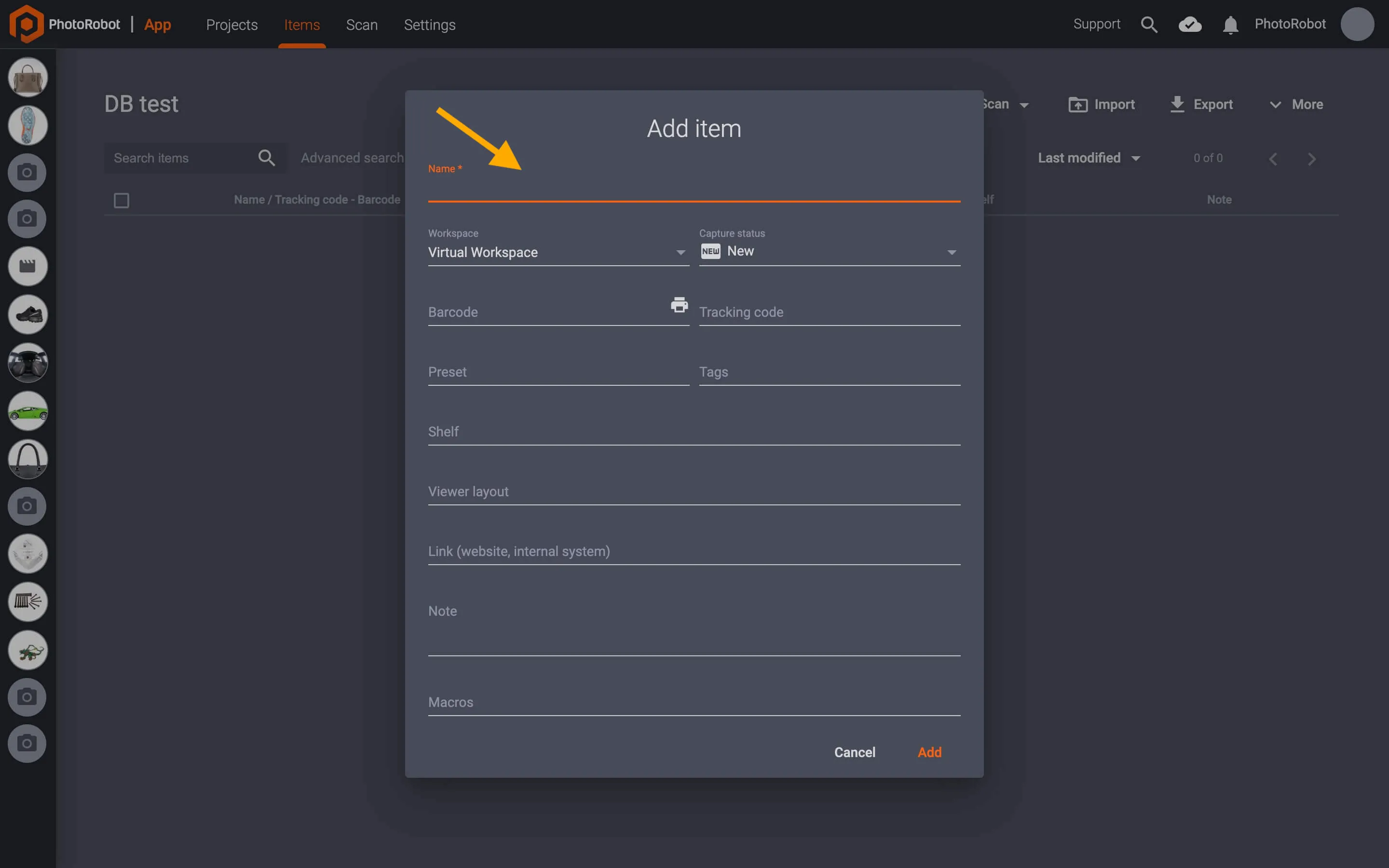
메모: 새 품목에 바코드가 있는 경우 새 품목을 수동으로 생성할 때 품목 바코드를 시스템에 입력하거나 스캔할 수 있습니다.
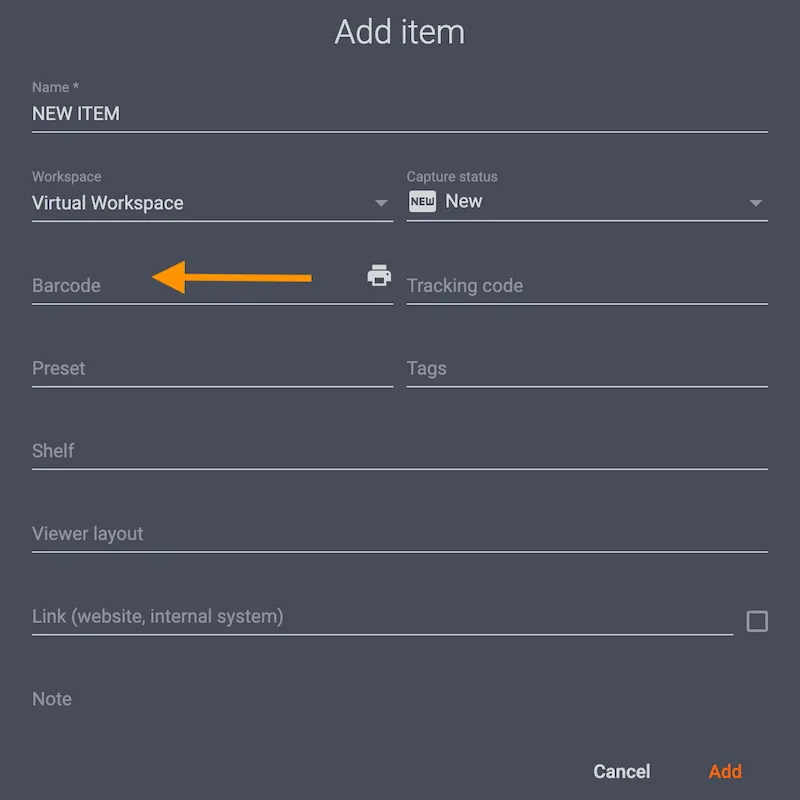
항목에 항목 바코드를 추가하면 항목 정보 영역에서 바코드 버튼을 클릭하여 캡처 모드 인터페이스 내에서 직접 바코드를 표시할 수 있습니다.
CAPP에 사용 중인 라이센스 유형을 고려해야 합니다. 클라우드 기반 라이선스를 사용하는 경우 위의 필드에 있는 속성 외에도 더 많은 속성이 있습니다.
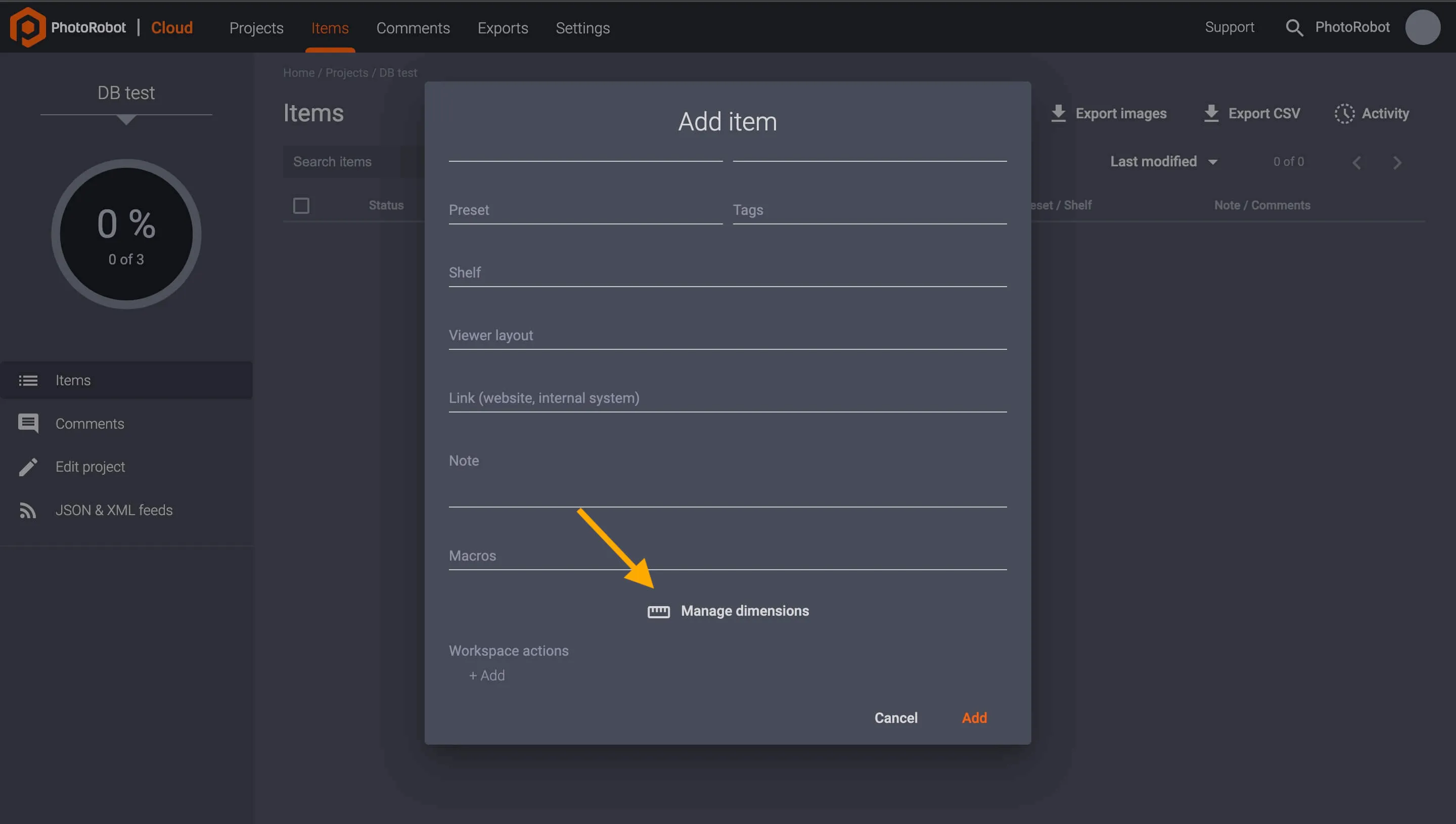
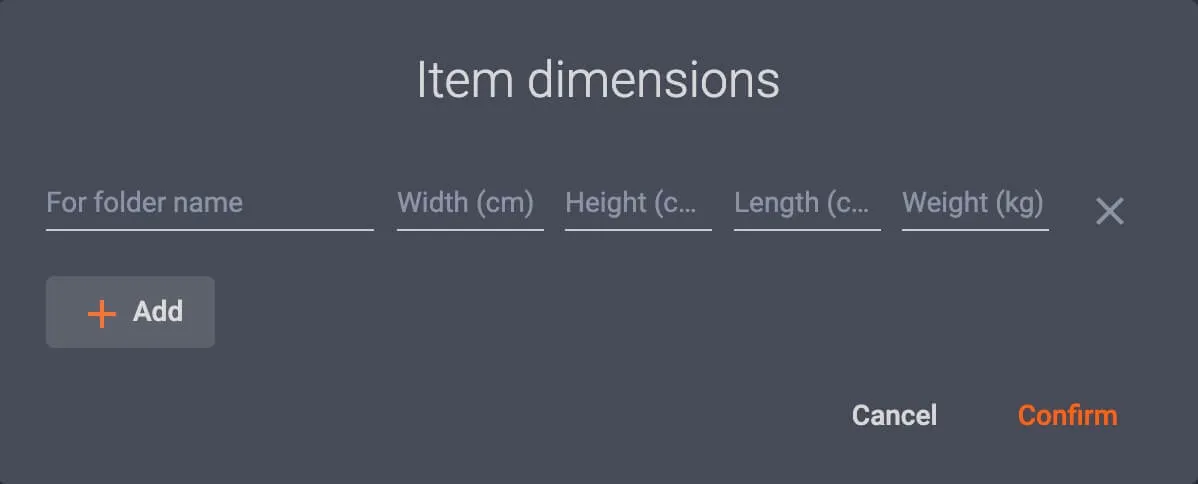
클라우드 기반 라이선스를 사용하여 새 항목 옵션의 맨 아래로 스크롤하고 차원 관리를 선택하여 항목의 너비, 높이, 길이 및 무게를 추가합니다. 참고: 활성 클라우드 기반 구독을 통해 사용자는 제한 없이 측정값을 추가할 수 있습니다. 속성을 입력하고 확인을 선택하여 항목에 차원을 추가합니다.
Add( 추가 )를 클릭하면 모든 사용자 구성 속성이 있는 새 항목이 만들어집니다.
새 항목 가져오기
또한 가져오기 기능을 사용하여 한 번에 여러 항목을 생성할 수 있습니다. 항목 가져오기 기능의 전제 조건은 CSV 파일을 통해 가져오는 것입니다. CSV 파일에는 사용자가 가져올 각 항목에 대한 모든 속성이 포함되어 있습니다.
CSV 파일은 각 개별 데이터 레코드를 구분하는 구분 기호와 함께 테이블 형식 데이터를 일반 텍스트로 저장합니다. 참고: 항목 가져오기를 위한 sample-import.csv 파일이 있으며 응용 프로그램에서 직접 다운로드할 수 있습니다.
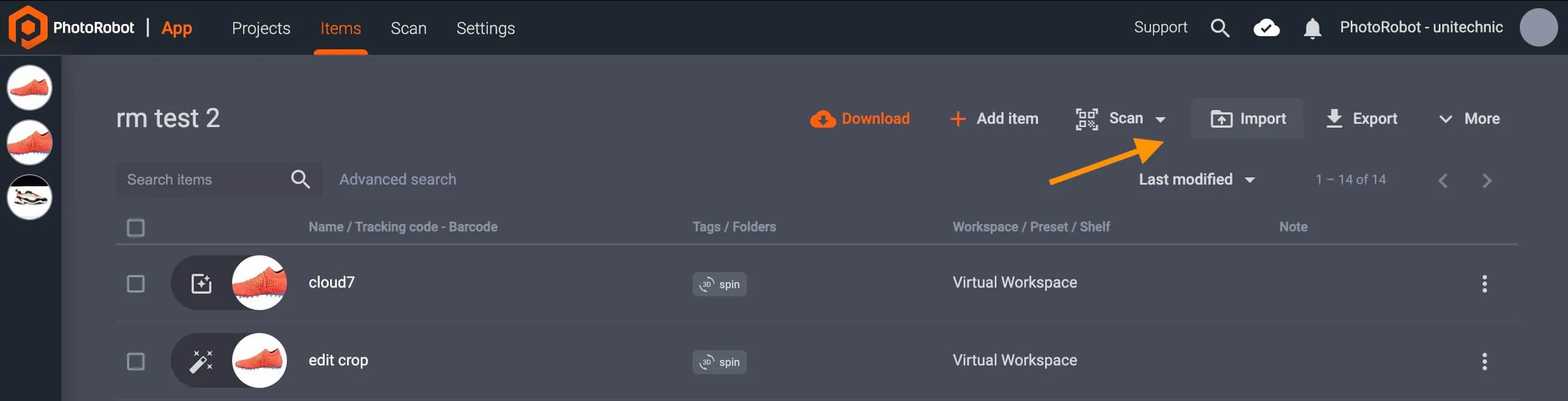
새 항목을 가져오려면 프로젝트 로 이동하여 가져오기를 선택합니다.
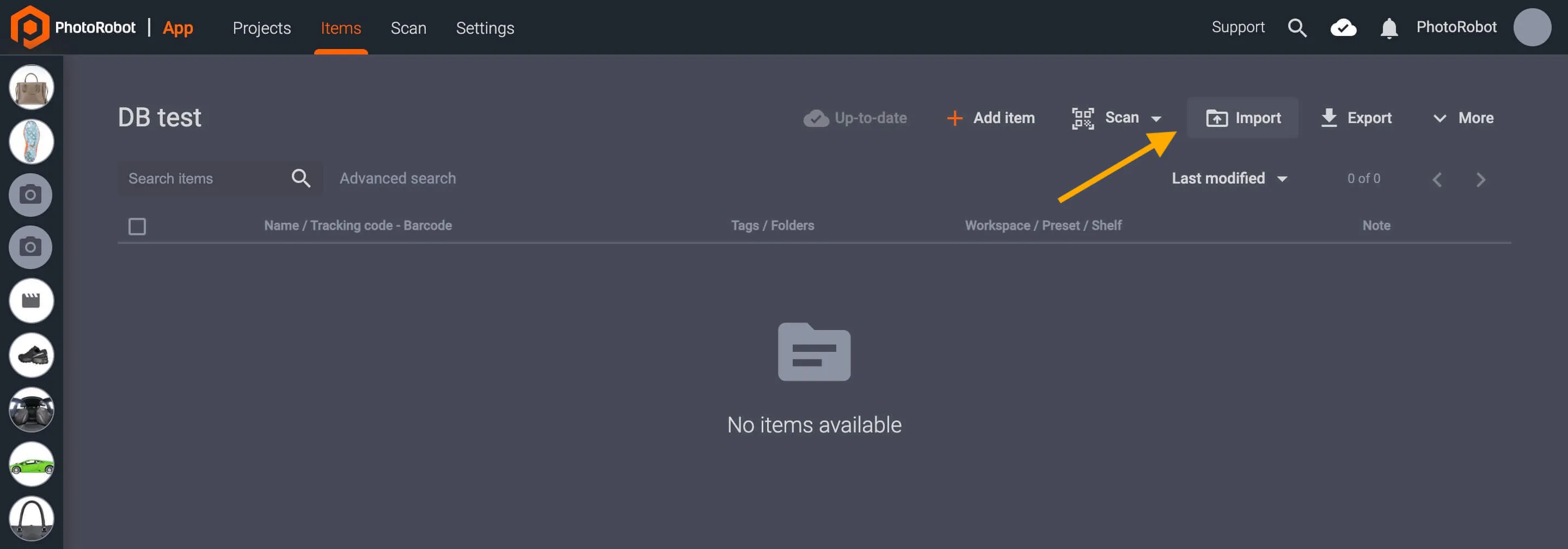
그런 다음 팝업 창에서 CSV 파일을 드래그 앤 드롭하거나 파일 찾아보기 버튼을 통해 CAPP로 가져올 로컬 폴더를 찾아볼 수 있습니다.
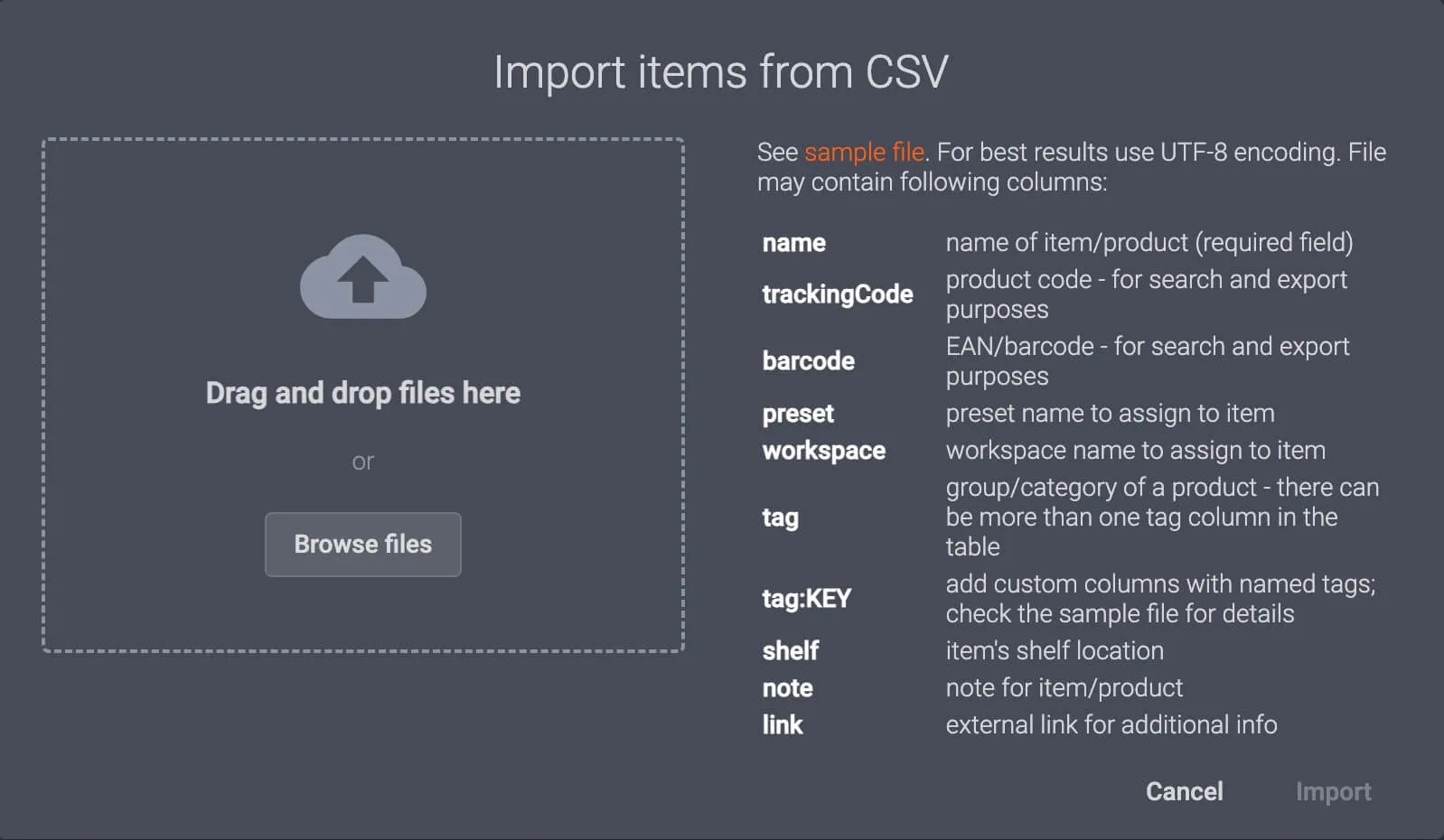
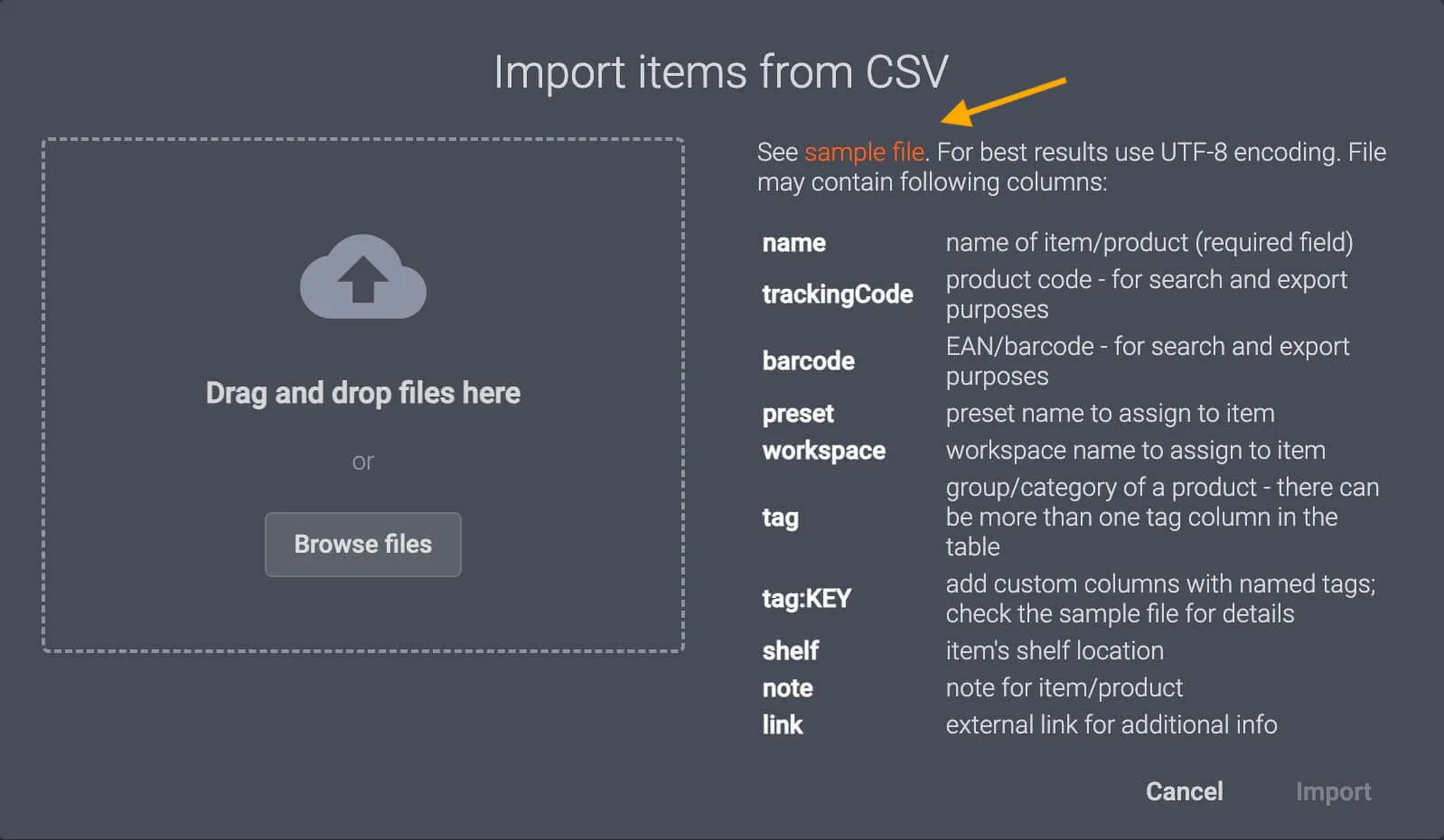
샘플 CSV 파일을 사용하려면 인터페이스의 오른쪽 상단에 있는 샘플 파일을 클릭합니다. 그러면 샘플 CSV가 로컬 컴퓨터에 다운로드됩니다.
기억하다: 항목 가져오기에는 활성 사용자 라이선스에 대한 제한 없이 항목 치수(길이, 너비, 높이, 무게)가 포함될 수 있습니다.
새 항목 자동 생성
CAPP에서 수동으로 항목을 생성하는 대신 고급 바코드 스캐너 설정을 사용하면 알 수 없는 바코드를 스캔한 후 새 항목을 자동으로 생성할 수 있습니다. 이 설정은 캡처 지점에서 항목을 식별하는 역할을 합니다(일반적으로 바코드 또는 QR 코드를 통해). 운영자가 알 수 없는 코드를 스캔하기만 하면 프로젝트에 새 항목이 자동으로 생성됩니다. 항목 이름은 스캔한 문자열과 항목의 식별자 필드에 따라 지정됩니다.
바코드 스캐너를 통한 자동 항목 생성을 활성화하거나 비활성화하려면 CAPP의 로컬 데스크톱 버전에서 일반 설정 에 액세스합니다. 그런 다음 바코드 스캐너 설정을 찾고 토글을 사용하여 알 수 없는 바코드를 스캔할 때 시스템에 자동으로 새 항목 생성을 켜거나 끕니다.
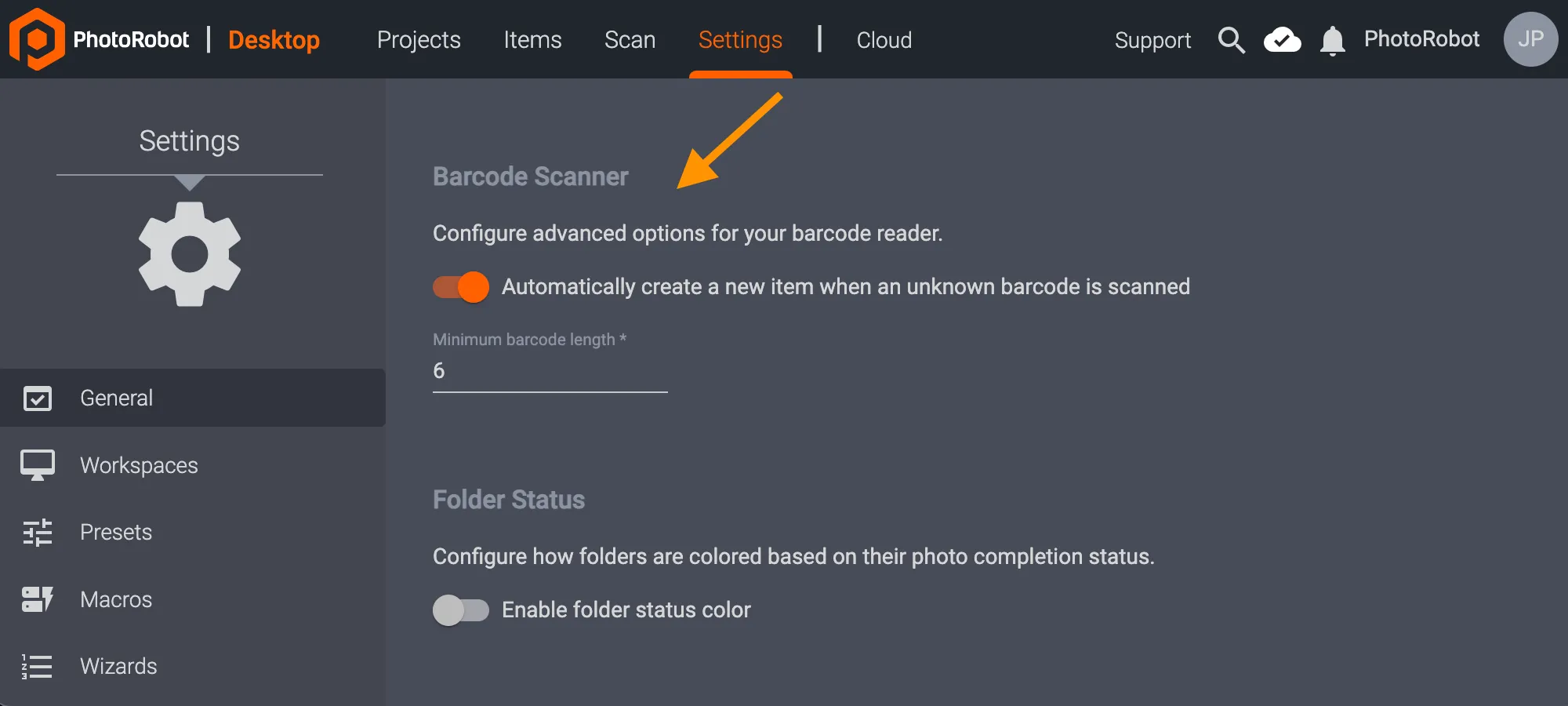
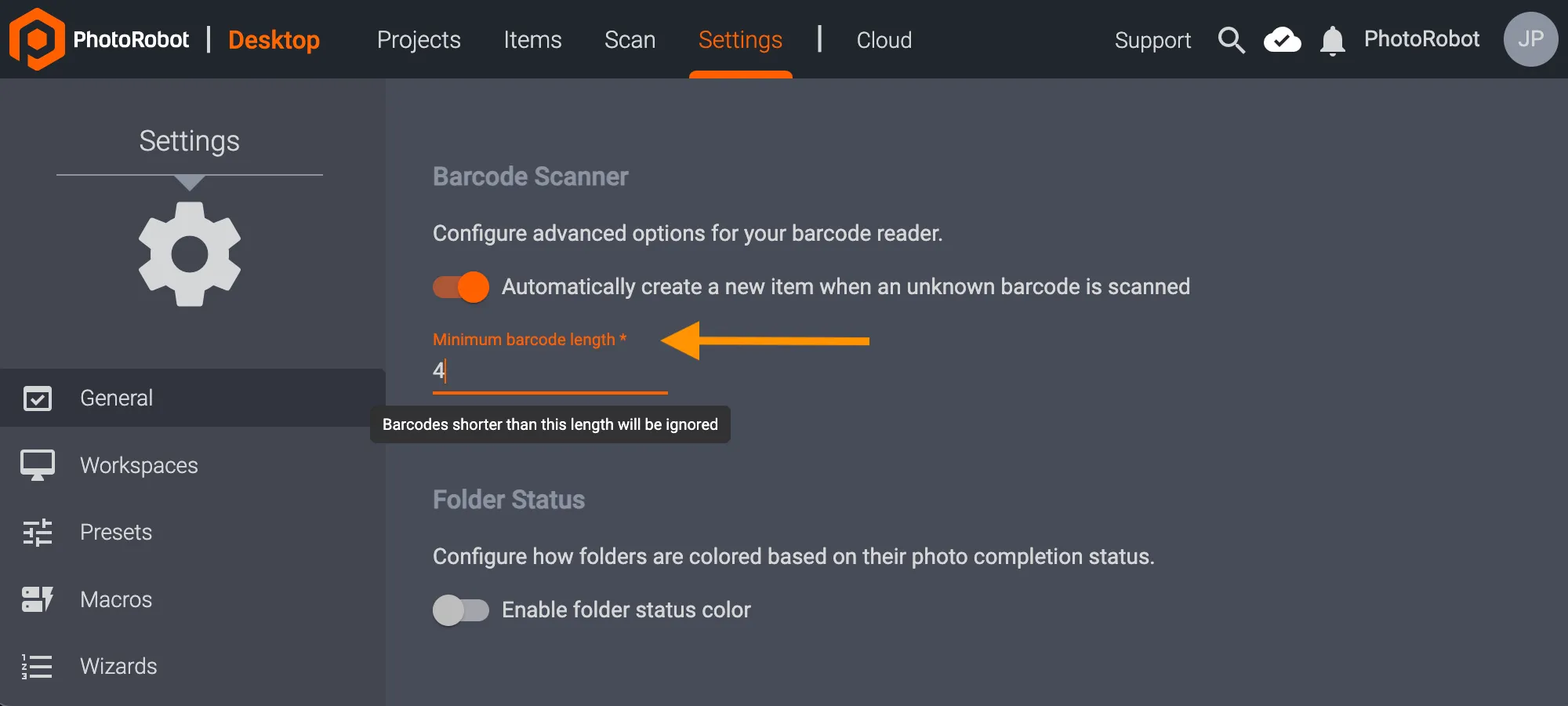
메모: CAPP 버전 2.13.beta58부터 바코드의 최소 문자열 길이를 구성할 수 있는 옵션이 있습니다. 이전에는 최소 바코드/QR 코드 길이가 6자였습니다(다른 문제 중에서도 스캔한 문자열의 이중 해석을 피하기 위해). 이제 이 숫자는 예를 들어 추가 조정 없이 4자 식별자가 작동할 수 있도록 조정할 수 있습니다.
바코드/QR 코드의 최소 문자열 길이를 조정하려면 일반 설정 - 바코드 스캐너의 CAPP의 로컬 버전에서도 최소 바코드 길이를 구성합니다. 입력된 길이보다 짧은 바코드는 시스템에서 무시됩니다.
품목 정보
CAPP 캡처 인터페이스의 이 섹션은 항목에 대한 기본 정보를 제공하며 3개의 주요 영역으로 구성됩니다.
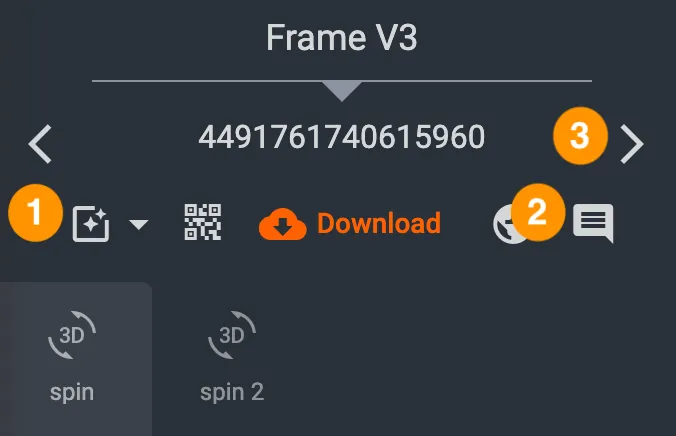
- 캡처 상태 - 항목 상태를 캡처, 편집, 다시 캡처 또는 수정 편집으로 전환합니다.
- 메모 - 모든 항목 수준 주석에 액세스하려면 클릭합니다.
- 다음/이전 - 선택한 항목 상태 필터에 따라 항목 간 탐색에 사용
메모: 항목에 수동으로 입력되거나 시스템에 자동으로 스캔된 바코드가 포함되어 있는 경우 항목 정보 영역에도 바코드 버튼이 표시됩니다. 바코드 버튼을 클릭하면 항목의 바코드를 표시하는 팝업 창이 시작됩니다.
팁: 항목을 빠르게 찾고 탐색할 수 있도록 결과를 제한하도록 항목 상태 필터 를 설정합니다.
- 표시된 항목만 표시하도록 결과를 필터링합니다: 캡처됨, 편집됨, 확인됨, 승인 됨 또는 거부됨.
예를 들어, 이미지 확인을 담당하는 경우 결과를 "편집됨"으로 제한하여 이미 사후 처리된 항목만 찾아 검토합니다. 검토 후 항목 상태를 "확인됨" 또는 "편집 수정"으로 설정하여 변경 사항을 승인 또는 거부하고 팀 구성원에게 알립니다. 항목 상태는 이미지를 게시할 준비가 되었거나 더 많은 편집이 필요한 경우 책임 당사자에게 알립니다.
폴더, 프레임 & 이미지
모든 시각적 자산은 폴더로 구성되며 폴더는 서로 다른 유형의 출력을 나타내도록 나뉘어져 있습니다. 세 가지 유형의 폴더는 다음과 같습니다 .
- 스핀 (360 / 3D)
- 스틸
- 비디오
각 폴더에는 개별 프레임이 포함되어 있습니다. 프레임은 촬영된 각도에 대한 정보(사진 프로세스에 대한 지침)와 이미지의 하나 또는 두 가지 버전으로 구성됩니다.
- 원본 - 카메라에서 받은 원본 파일
- 편집됨 - PhotoRobot의 후처리 도구를 통해 편집된 이미지 파일
다음과 같이 폴더 인터페이스를 탐색합니다.
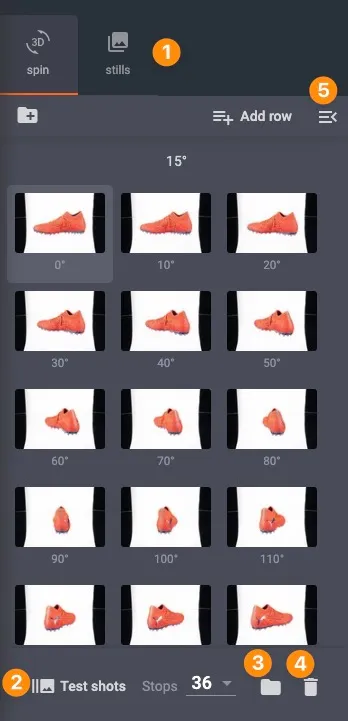
- 폴더 중에서 선택 (1)
- 테스트 샷을 찍어 구성 실험 (2)
- 로컬 컴퓨터 컴퓨터에서 이미지 저장소 열기(3)
- 다시 캡처하기 위해 사진 지우기 (4)
- 액세스 폴더 메뉴* (5)
폴더 메뉴에는 다음 기능이 포함되어 있습니다.
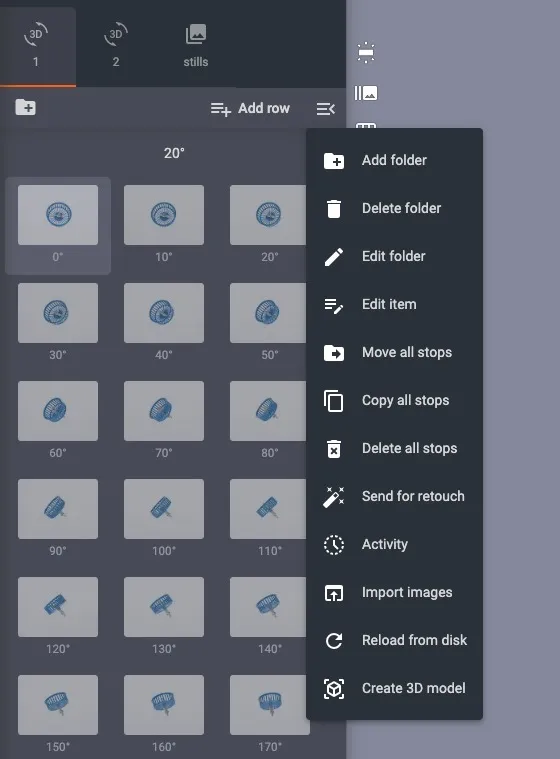
- 폴더 추가/삭제/편집
- 폴더 간 프레임 복사 / 이동
- 프레임 삭제 - 모든 이미지 및 각도 구성과 함께 모든 프레임을 완전히 제거합니다.
- 수정을 위해 보내기 - 외부 보정을 위한 항목 표시
- 활동 - 항목의 활동 로그 보기
- 이미지 가져오기 - 나만의 이미지 업로드
- 3D 모델 생성 - 폴더에 포함된 이미지에서 3D 모델 생성(*MacOS에서만 사용 가능, 여러 PhotoRobot 지원 3D 모델 형식 포함)
또한 각 프레임 내에는 추가 메뉴 옵션이 있습니다.
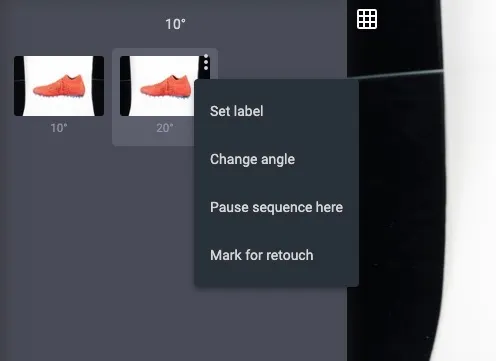
- 레이블 설정 - 개별 프레임에 대한 레이블 만들기(예: "영웅 샷 - 전면", "3/4", "뒤로" 또는 GS1 이미지 명명 규칙)
- 각도 변경 - 개별 프레임의 각도 조정
- 여기서 시퀀스 일시 중지 - 이 프레임에서 촬영 시퀀스를 일시 중지하고 작업자가 촬영을 재개할 때까지 기다리려면 선택합니다.
- 수정 표시 - 외부 제3자 수정을 위한 이미지 지정
시퀀스 제어
시퀀스를 시작하려면 화면 하단의 재생 버튼(1)을 누릅니다.
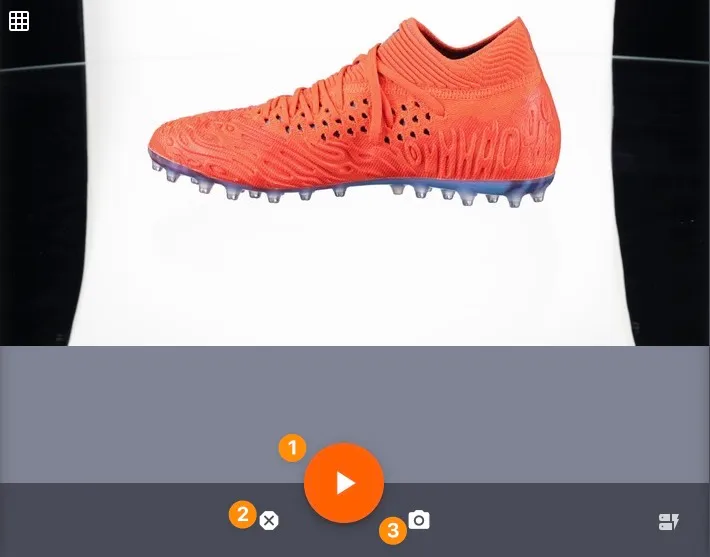
비상 정지 버튼(2)을 통해 언제든지 시퀀스를 중단합니다.
스틸 폴더에서 스냅샷 찍기 버튼(3)을 사용하여 프레임을 먼저 정의하지 않고 캡처합니다. 그런 다음 스냅샷이 캡처되어 스틸 폴더에 새 프레임으로 포함됩니다.
시퀀스 옵션
CAPP 인터페이스의 오른쪽 패널을 따라 시퀀스 옵션을 구성합니다. 시퀀스 옵션에는 다음이 포함됩니다.
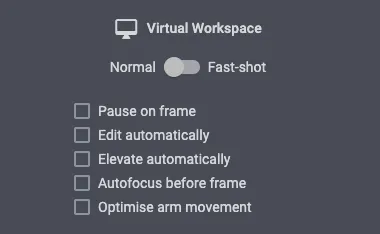
- 작업 영역 구성 - 작업 영역에 액세스하거나 각 작업 영역 간의 변경
- 일반 vs 빠른 샷 토글 - 사진을 찍기 전에 턴테이블 회전을 일시 중지하거나(보통), 훨씬 더 빠른 시퀀스의 경우 논스톱 회전(빠른 샷) 중에 사진을 찍도록 구성합니다.
- 프레임에서 일시 중지 - 턴테이블 회전을 명령하여 각 프레임 이후에 중지하도록 토글합니다(제품 애니메이션을 만들 때 유용함).
- 자동 편집 - 캡처 직후 편집을 자동화하도록 구성
- 자동으로 상승 - 시퀀스를 시작하기 전에 제품 중앙으로 자동 상승을 사용하도록 설정합니다(항목 치수 사용).
- 팔 움직임 최적화 - 시퀀스 후에 팔은 마지막으로 촬영된 행의 위치에 유지됩니다. 다음 순서는이 위치에서 시작됩니다.
스핀
Spin 폴더에서 360도 제품 사진에 대한 옵션을 찾습니다.
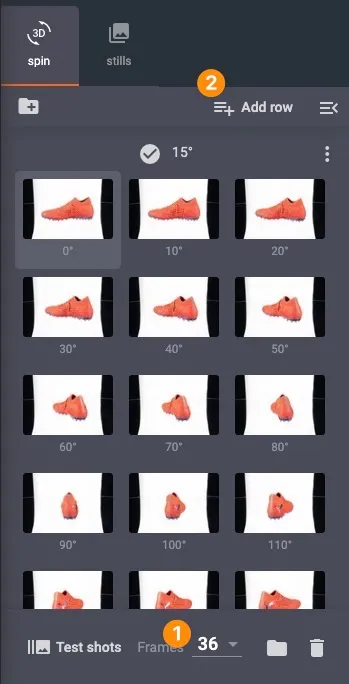
회전당 캡처할 프레임 수(예: 24, 36 등)를 선택하도록 프레임 (1)을 구성합니다. 행 추가(2)를 사용하여 다른 스윙 각도(카메라가 오브젝트를 가리키는 수직 각도)에서 추가 행 을 캡처하도록 지정합니다.
스틸
스틸 폴더에 캡처할 프레임을 정의하려면 인터페이스의 오른쪽 위 모서리에 있는 프레임 추가 를 사용합니다.

또는 스냅숏 찍기를 눌러 동시에 사진을 찍고 해당 프레임을 새로 만듭니다. WiFi를 통해 카메라를 연결하여 손으로 사진을 찍고 스틸 폴더에 새 프레임(클로즈업, 디테일 샷)을 자동으로 추가합니다.
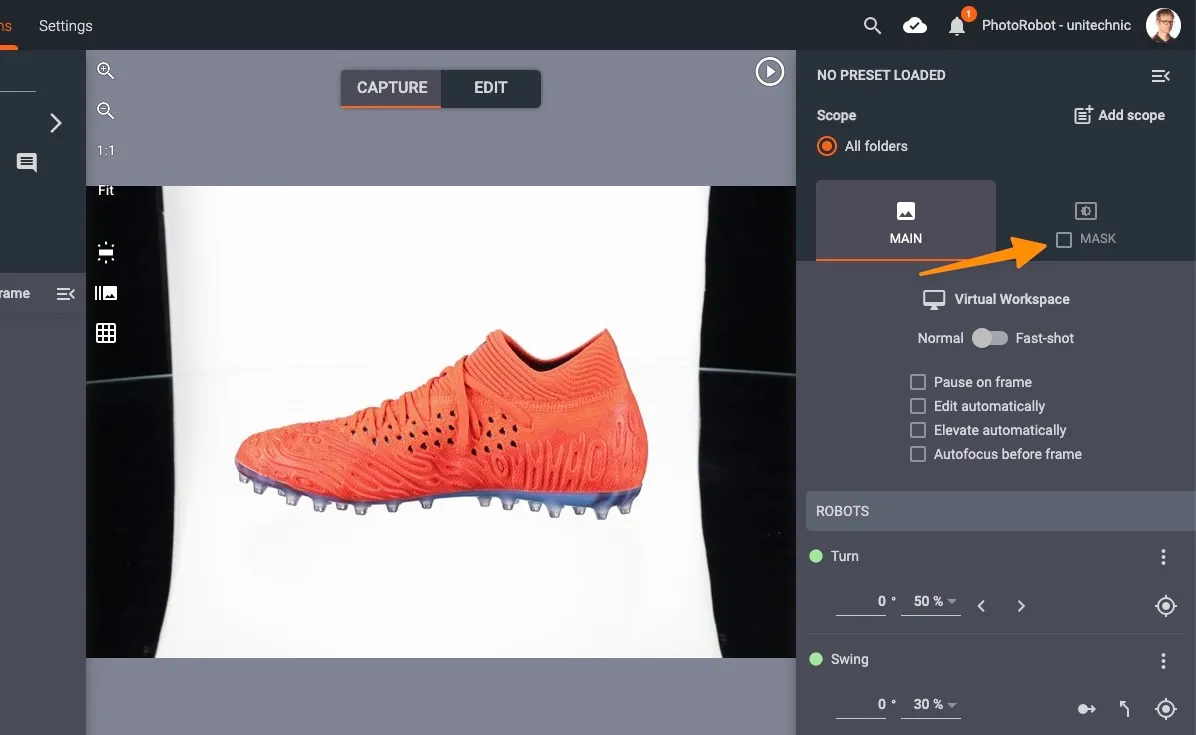
Freemask 배경 제거
프리마스크 배경 제거는 각 프레임에 대해 두 개의 이미지가 캡처되는 프로세스입니다.
- 메인 이미지 - 물체의 표준 사진
- 마스크 이미지 - 뒤에서 점등된 물체의 사진


그런 다음이 두 이미지는 배경이 개체 주위를 효과적으로 제거 한 사진을 얻기 위해 합성됩니다.

Freemask를 활성화하려면 오른쪽 패널에서 마스크 확인란을 선택합니다.
하드웨어 구성
로봇
로봇(또는 로봇 조합)에 따라 최대 3가지 유형의 로봇 움직임이 있으며 각 움직임의 위치, 속도 및 보정에 대한 제어 옵션이 있습니다.
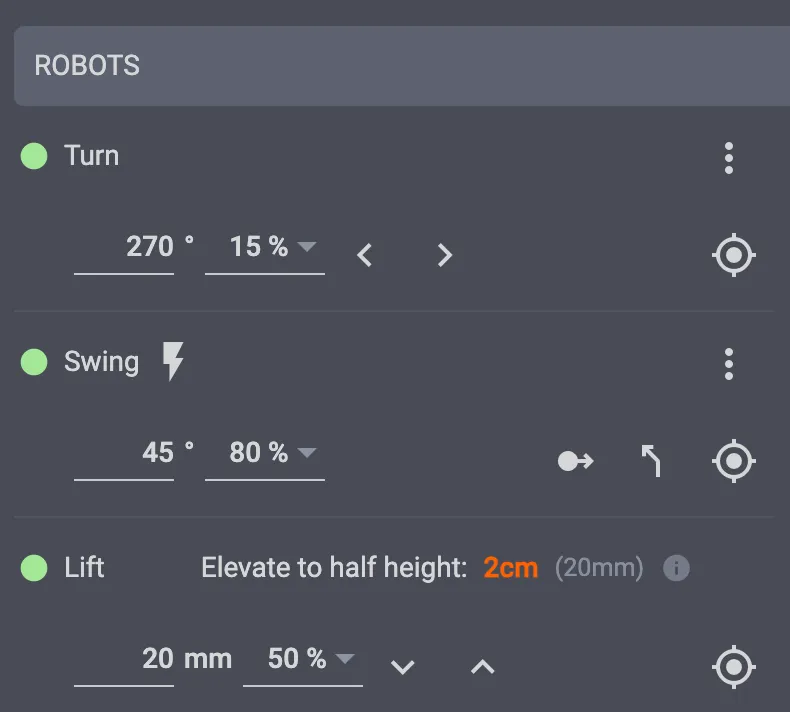
- 회전 - 대부분의 PhotoRobot 장치에 대한 표준인 Turn을 사용하면 사용자가 중심을 중심으로 턴테이블 회전을 제어할 수 있습니다.
- 스윙 - 카메라가 물체를 겨냥하는 수직 각도를 구성합니다(즉, 턴테이블의 레벨을 유지하려면 0°, 제품을 내려다 보는 상단 뷰의 경우 90°)
- 리프트 - 카메라 고도 설정
회전, 스윙 및 리프트에 대한 구성 가능한 옵션 내에서 위치, 속도 및 보정 설정을 찾습니다.
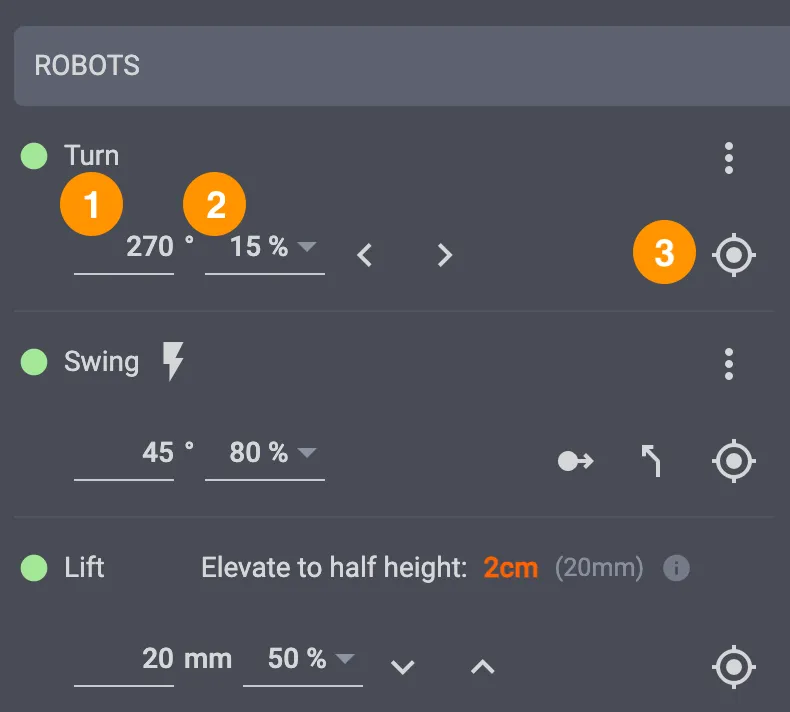
- 위치 상태 설정(1)을 사용하여 로봇을 이동합니다.
- 속도 입력(2)을 사용하여 이동 속도를 구성합니다.
- 보정 버튼(3)을 사용하여 로봇을 시작 위치로 설정합니다.
움직임을 처음 구성하는 경우 항상 보정을 통해 로봇을 초기 위치로 설정하십시오.
또한 CAPP 버전 2.13.3부터 캡처 모드 인터페이스에서 회전 및 스윙에 대해 구성 가능한 빠른 각도 사전 설정이 있습니다. 회전/스윙 필드 옆에 있는 세 개의 수직 점을 클릭한 다음 각도 사전 설정 구성을 클릭합니다.
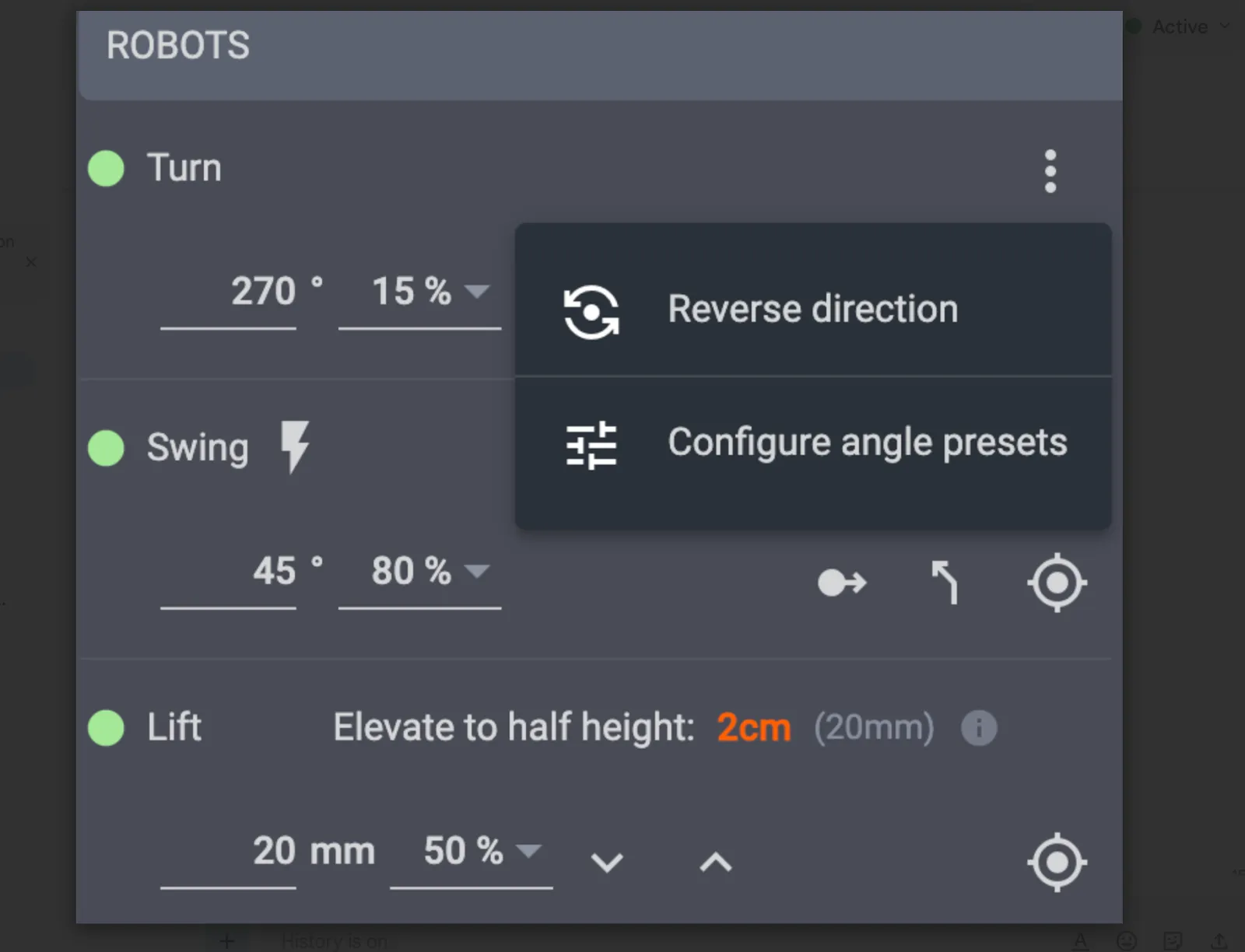
그러면 사용자가 쉼표(최대 4)로 구분된 원하는 회전 또는 스윙 각도(예: 0, 90, 180, 270)를 입력할 수 있는 팝업 창이 시작됩니다.
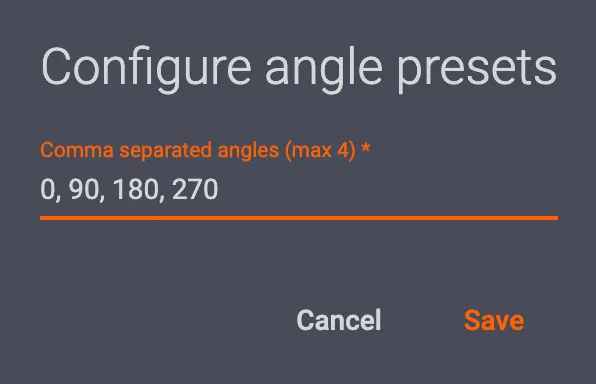
저장을 클릭하면 사전 설정된 스윙/회전 각도가 로봇 설정에 적용되어 캡처합니다.

카메라
카메라 인터페이스를 통해 시퀀스에 대해 하나 이상의 카메라를 사용하도록 설정합니다.

라이브 뷰 아이콘(1)을 클릭하여 라이브 뷰 사진을 클릭하여 초점 포인트를 선택할 수 있도록 합니다. 카메라 제외 아이콘(2)을 통해 시퀀스에서 카메라를 제외 합니다. 제외된 카메라는 시퀀스 중에 트리거되지 않습니다. 일반적으로 이 기능은 사용자가 미리 정의된 스핀 및 스틸과 함께 손으로 사진을 찍기 위해 WiFi를 통해 추가 카메라를 연결했을 때 유용합니다.
참고: 자세한 내용은 카메라 구성에 대한 PhotoRobot 지원 설명서를 참조하십시오.
조명
CAPP는 스트로브 조명(Broncolor 또는 FOMEI)과 DMX를 지원하는 모든 LED 조명을 지원합니다. CAPP에서 조명을 설치하고 구성하는 방법에 대한 지침은 작업 공간 설정에 대한 PhotoRobot 설명서를 참조하십시오.
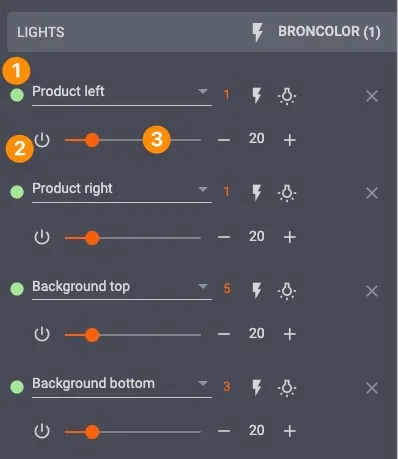
CAPP Lights 인터페이스에서 조명 위치 메뉴(1)를 통해 개별 조명의 위치를 지정합니다. 드롭다운 메뉴를 사용하여 사용자 지정 위치 또는 미리 정의된 위치 중 하나를 선택합니다. 미리 정의된 위치는 다음과 같습니다.
- 제품 왼쪽 / 제품 오른쪽 – 전면에서 제품을 비추도록 배치된 조명
- 배경 위쪽 / 배경 아래쪽 - 흰색 배경을 만들기 위해 뒤에서 배경을 비추는 조명
사용자 지정 위치를 정의하려면 위치 목록 옵션에서 사용자 지정 위치를 선택합니다.
전원 버튼(2)을 통해 조명을 켜거나 끕니다. 이는 예를 들어 마스크 이미지를 촬영하기 위해 전면 조명을 꺼야 하는 프리마스크 접근 방식에 유용합니다.
더 어둡거나 밝은 조명을 위해 조명 강도 슬라이더(3)를 왼쪽에서 오른쪽으로 이동합니다. 참고: 일부 DMX 제어 조명은 색온도 제어도 제공합니다.
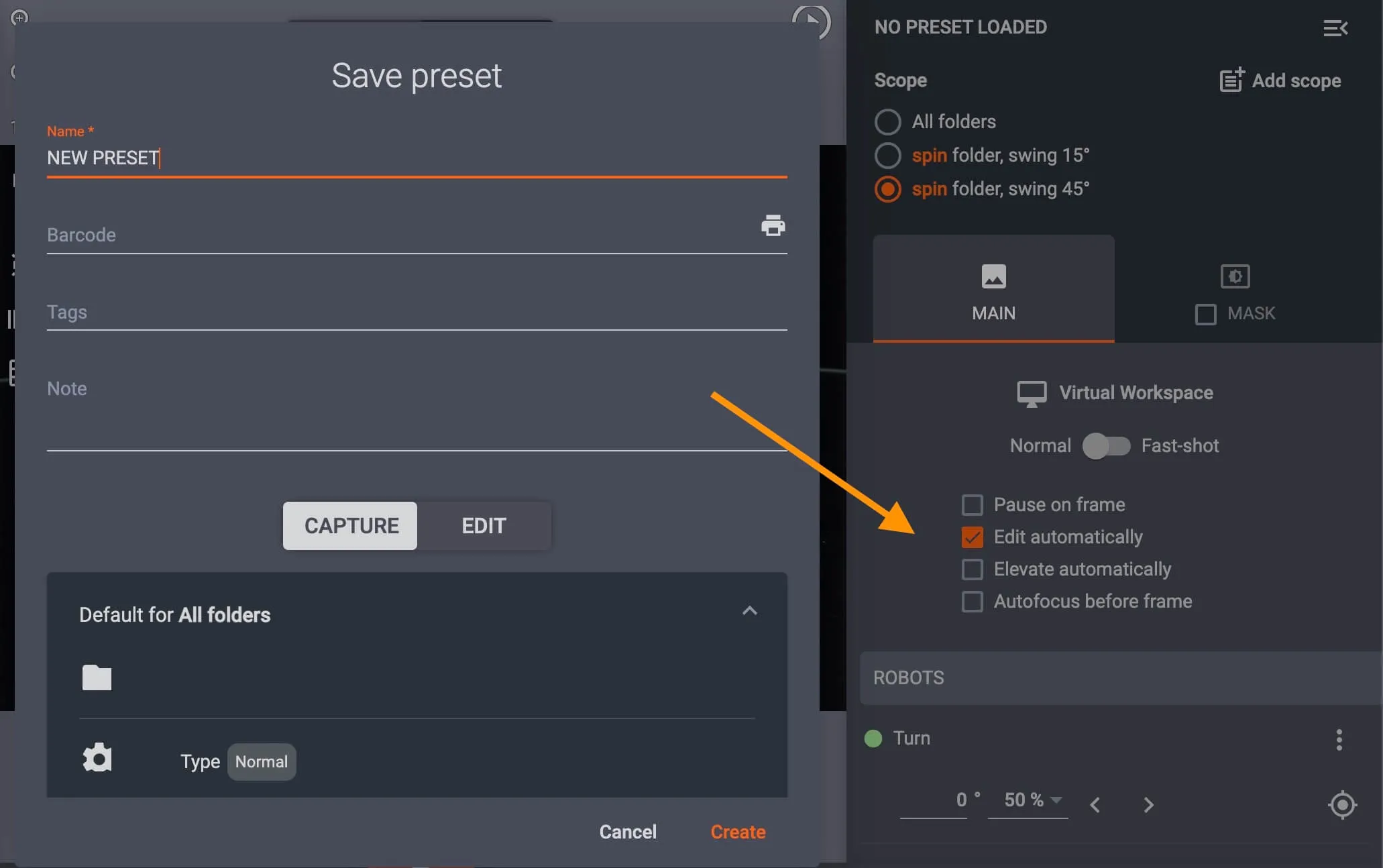
스코프 & 프리셋
기본적으로 하드웨어 구성은 항목 내의 모든 폴더에서 동일합니다.
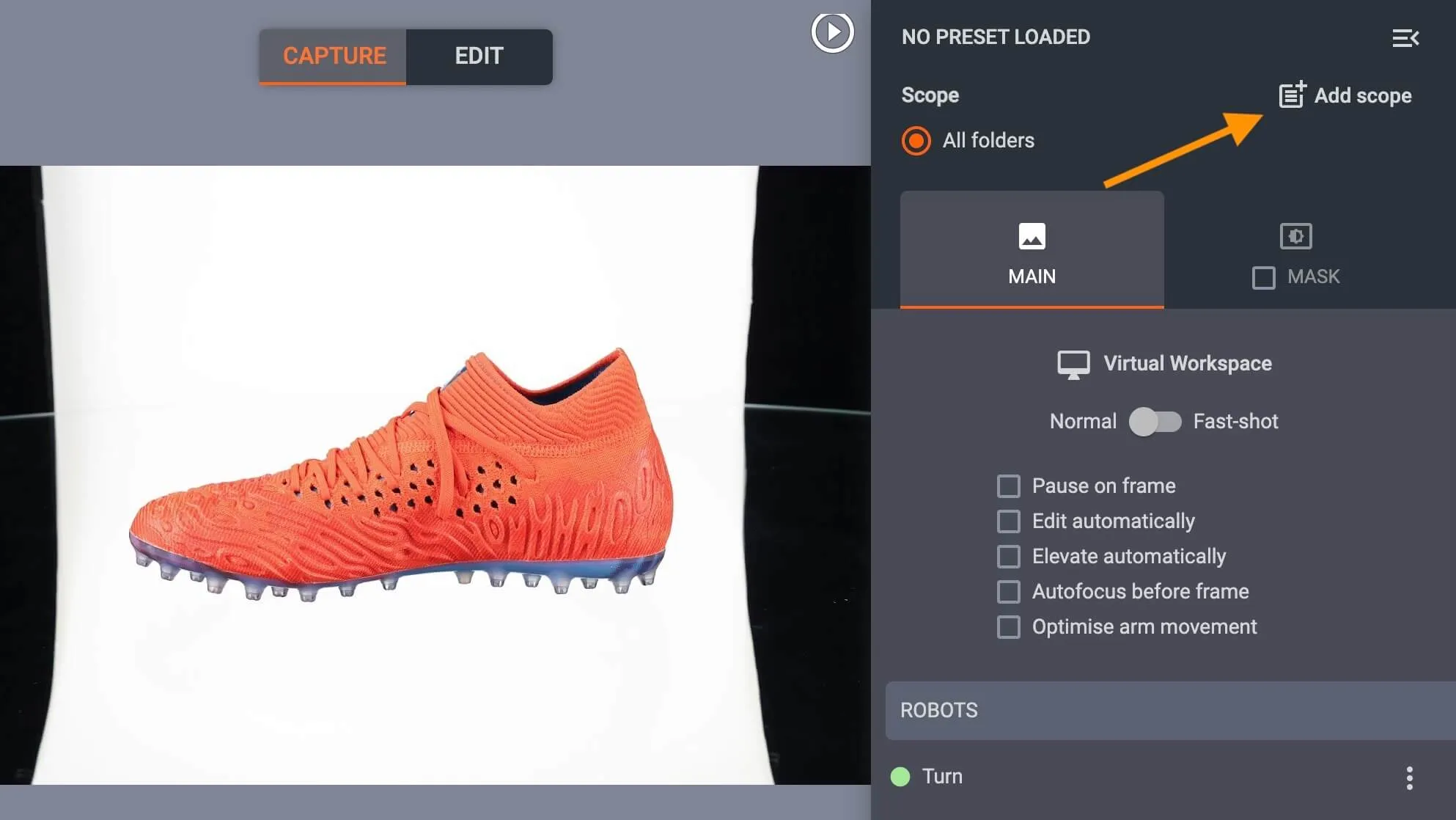
하드웨어 설정(폴더 또는 행별)을 사용자 지정하려면 범위 추가 단추를 사용합니다.
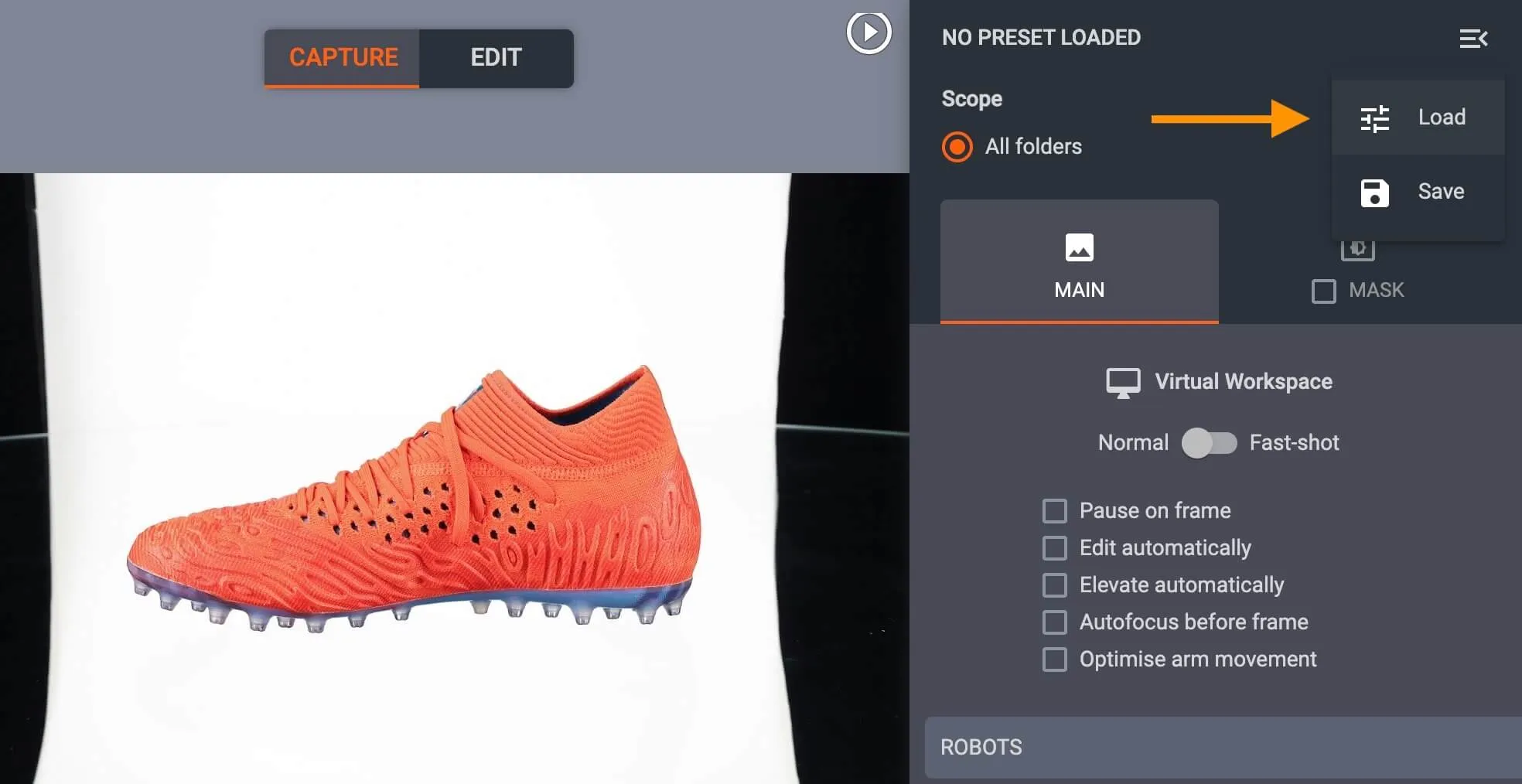
구성을 사용자 정의한 후 사전 설정의 드롭다운 메뉴를 통해 오른쪽 위 모서리에 설정을 로드하거나 저장합니다.
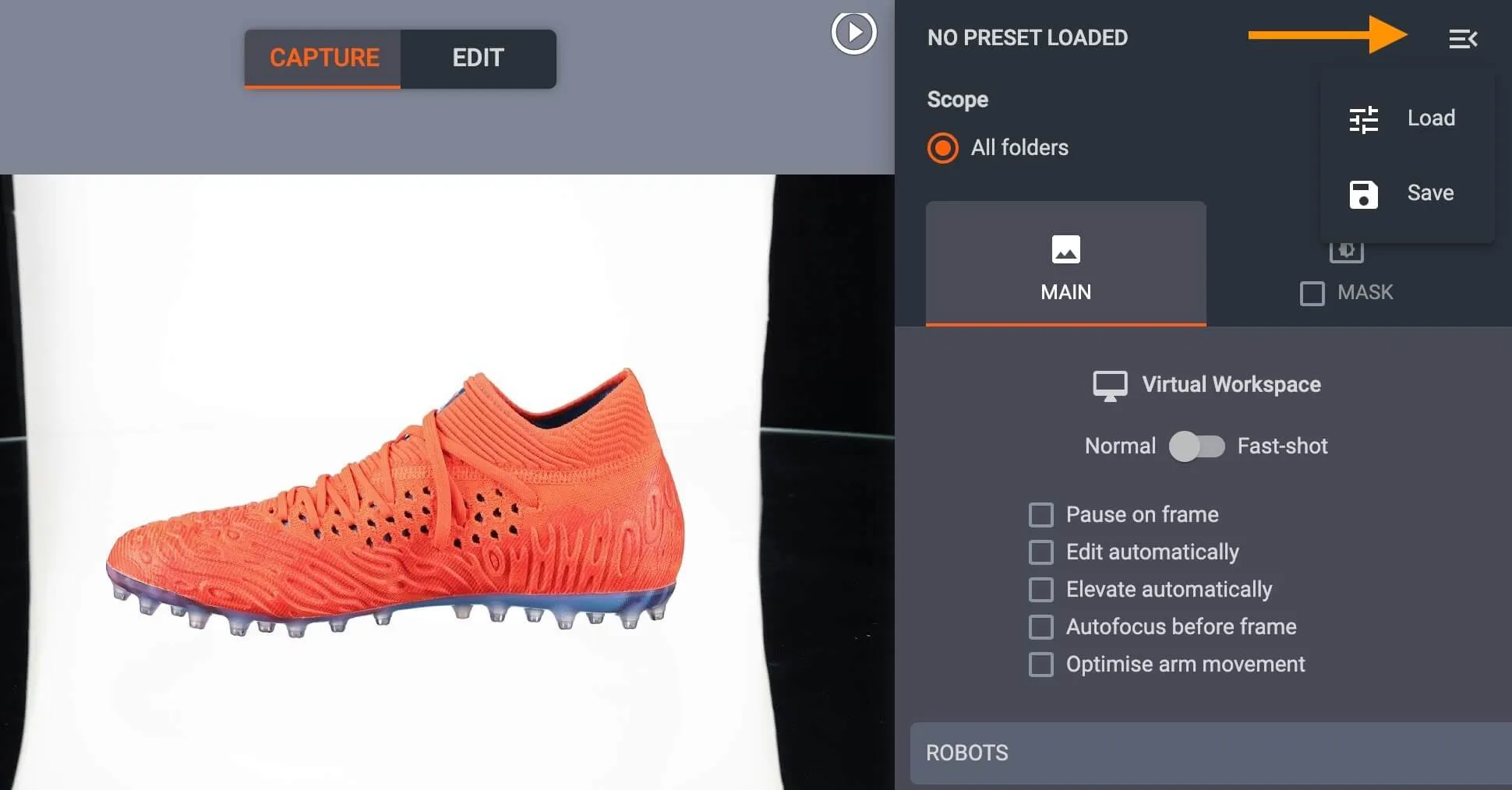
- 파일 아이콘을 클릭하여 모든 캡처 설정을 저장하고 나중에 구성을 로드하여 유사한 사진 촬영에서 재사용할 수 있습니다.
사전 설정 할당
CAPP에는 하나의 항목 또는 여러 항목에 대한 사전 설정을 로드/할당하는 3가지 방법이 있습니다.
1. 항목을 선택하고 인터페이스의 오른쪽 상단에 있는 드롭다운 메뉴 아이콘을 통해 Preset을 로드합니다.
- 또는 핫키 “P”를 사용하여 저장된 프리셋을 엽니다. 그런 다음, 항목에 적용할 구성을 선택합니다. 이렇게 하면 촬영될 프레임에 대한 폴더와 모든 캡처 설정 및 사전 정의된 편집 작업이 생성됩니다.
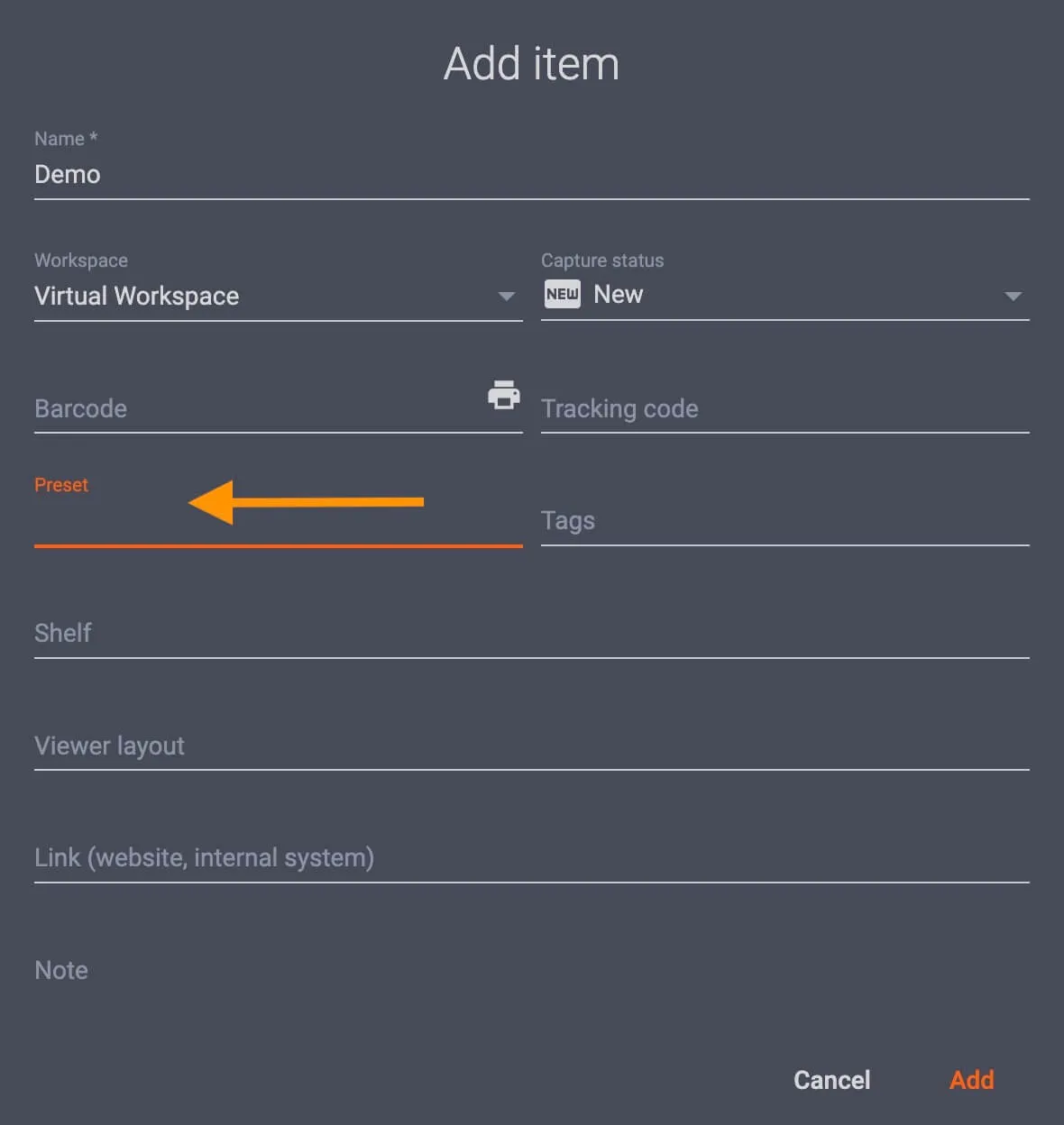
2. 항목을 생성할 때, 사용자는 '항목 추가' 메뉴를 통해 '사전 설정' 필드를 클릭하여 구성을 선택할 수 있습니다.
- 사전 설정을 여러 항목에 할당하려면 [항목] 메뉴에서 항목을 선택하고 [사전 설정 할당]을 클릭합니다.
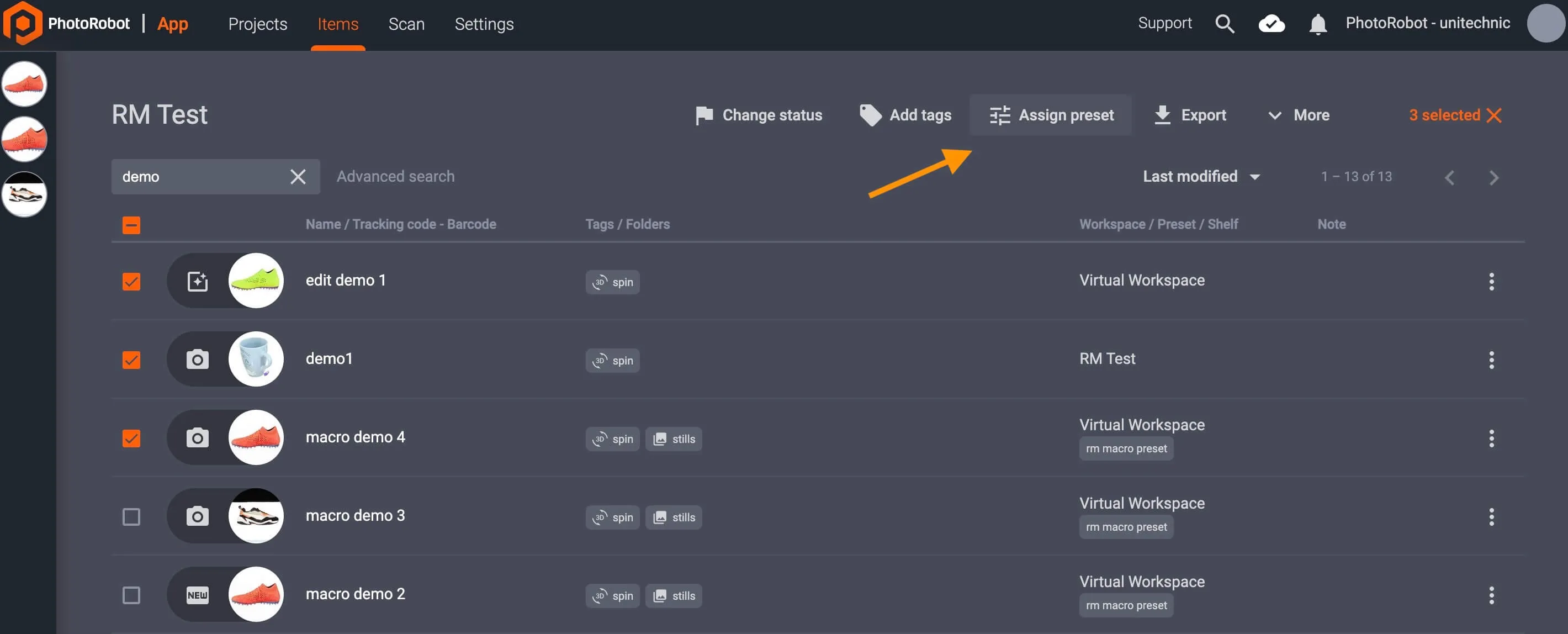
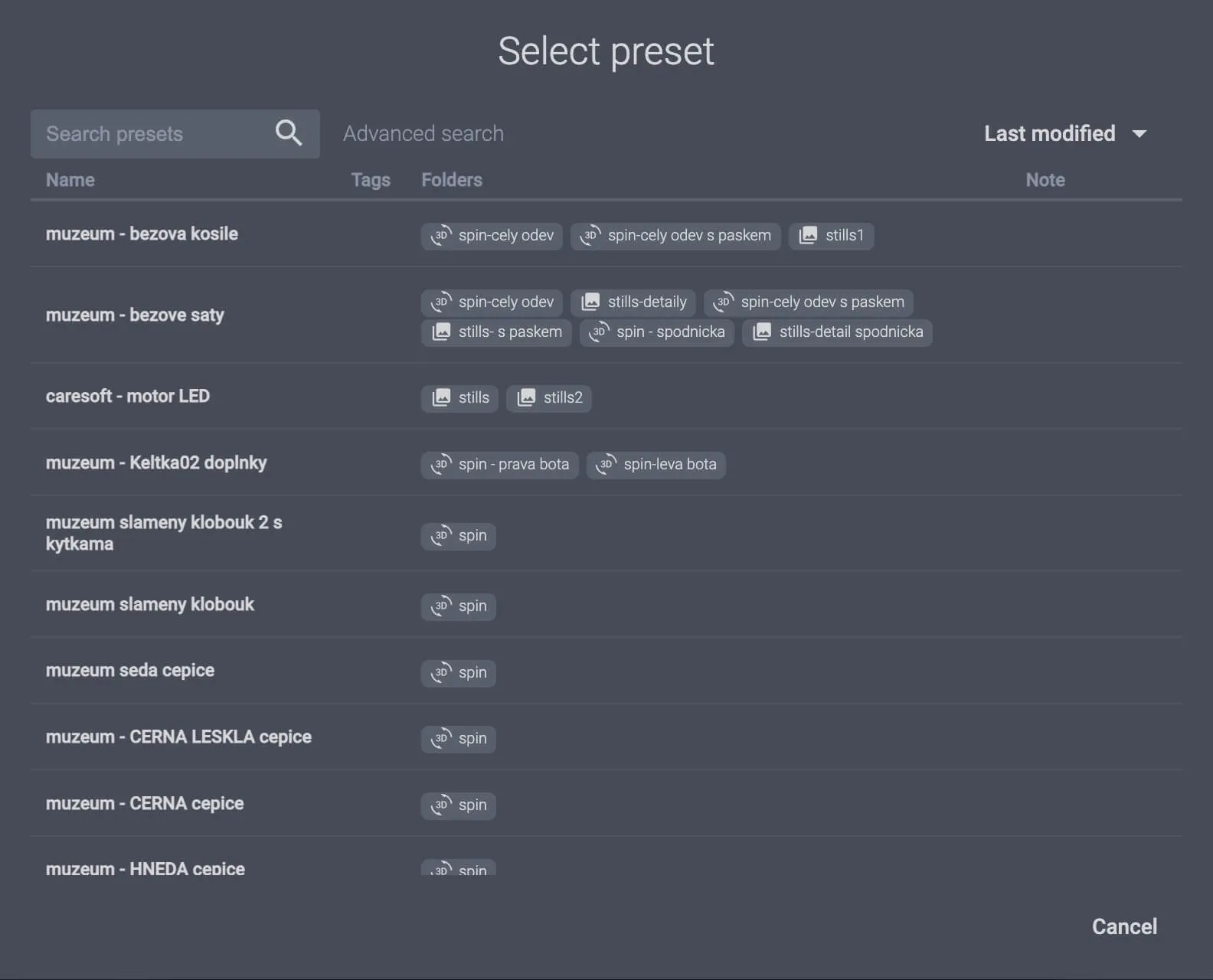
- 이름으로 프리셋을 선택하고 프리셋 할당 을 다시 클릭하여 항목에 할당합니다.

3. 또는 항목 메뉴에서 수입 CSV에서 항목을 가져옵니다.
- CSV 가져오기 기능을 사용하면 PhotoRobot 사용자가 Excel에서 해당 구성으로 항목을 만들어 시스템으로 가져올 수 있습니다.
- CSV 파일에는 다음과 같은 사용자 정의 가능한 열과 사전 설정 이름으로 사전 설정을 항목에 할당하는 하나의 기능이 포함될 수 있습니다.
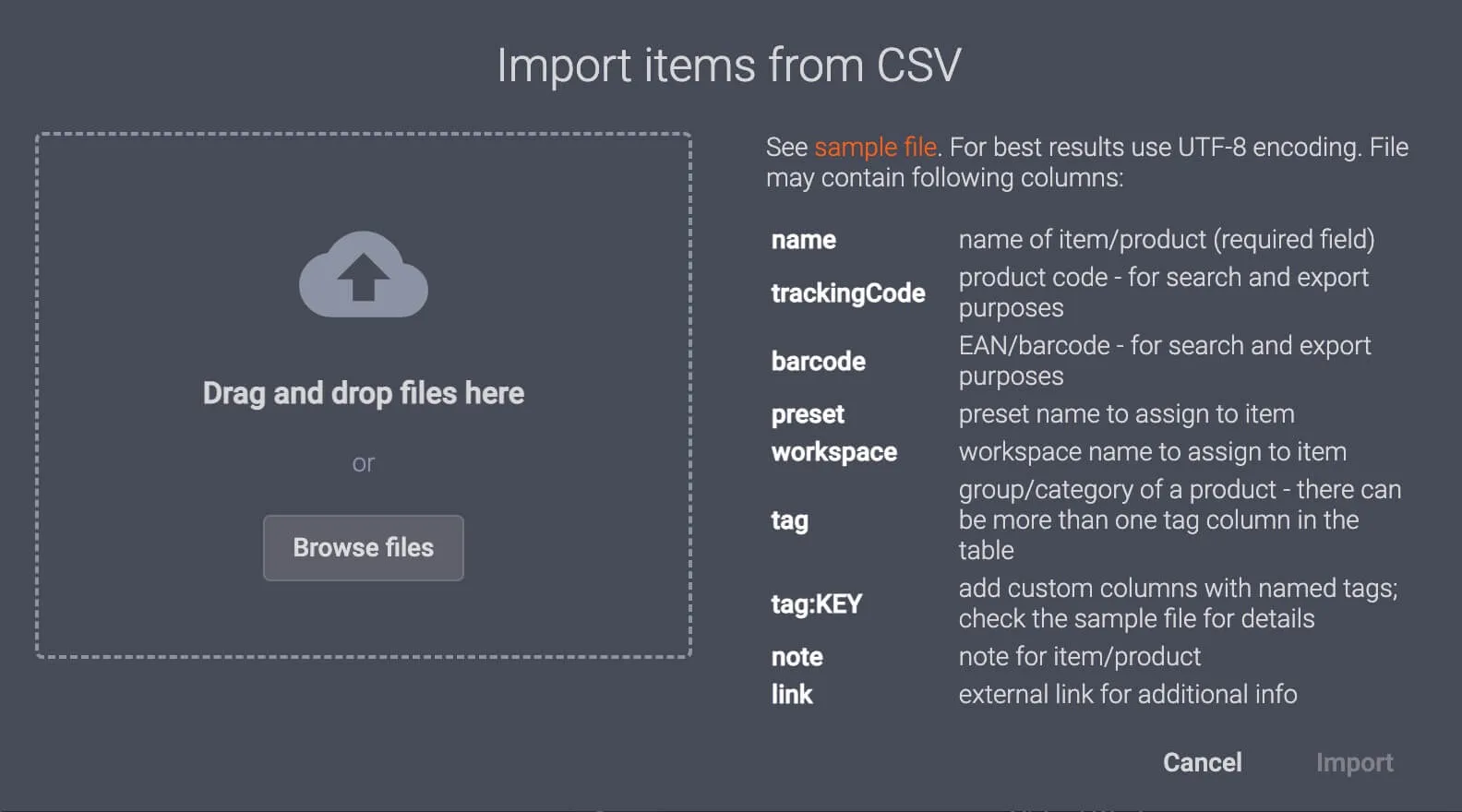
( ! ) - 참고: CSV 가져오기를 사용하는 경우 최상의 결과를 얻으려면 UTF-8 인코딩을 사용하는 것이 좋습니다.
선반에 품목 분류하기(카트)
또한 CAPP에서 항목을 선반 (또는 카트)으로 정렬하면 항목에 선반을 할당한 후 작업 공간과 사전 설정을 자동으로 설정하여 워크플로우를 단순화할 수 있습니다.
시스템에서 선반(또는 장바구니) 코드를 생성하면 구성 가능한 사진 촬영 설정을 사용하여 항목을 범주로 정렬하는 데 도움이 됩니다. 앱에서 해당 설정을 구성하거나 바코드 리더 지원의 CAPP 통합을 통해 항목에 선반을 할당할 수 있습니다.
바코드 리더 지원을 통해 팀은 고유한 바코드를 인쇄 할 수 있으며, 이를 스캔하기만 하면 선반에 품목을 할당할 수 있습니다. 이러한 방식으로 팀은 선반 코드를 스캔한 다음 항목을 스캔하여 마우스를 클릭하거나 워크스테이션 컴퓨터로 이동하지 않고도 사진 촬영 설정을 빠르게 할당할 수 있습니다.
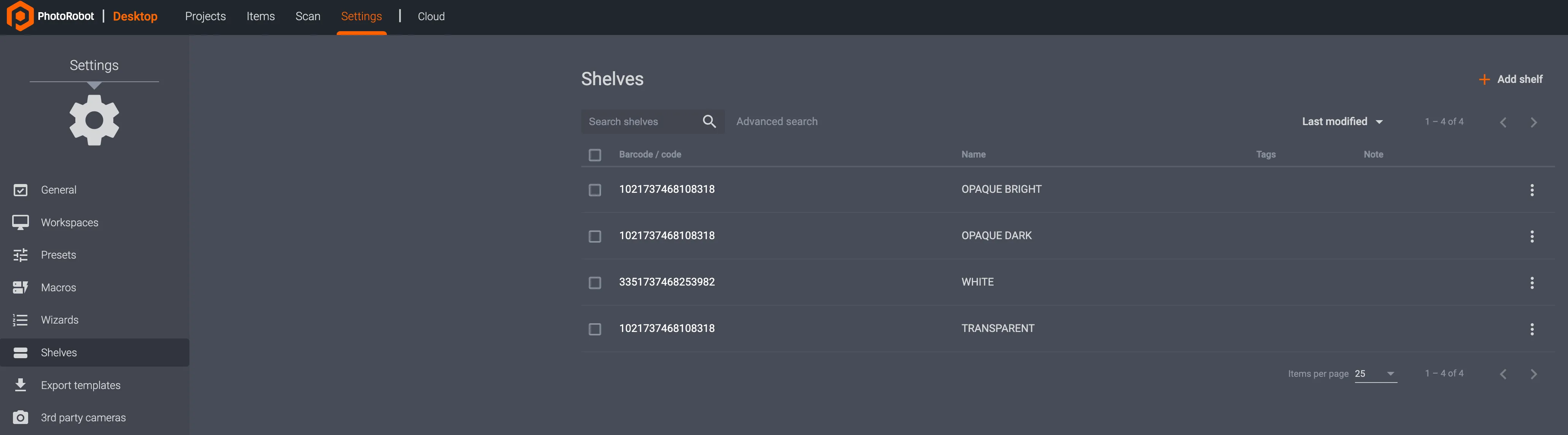
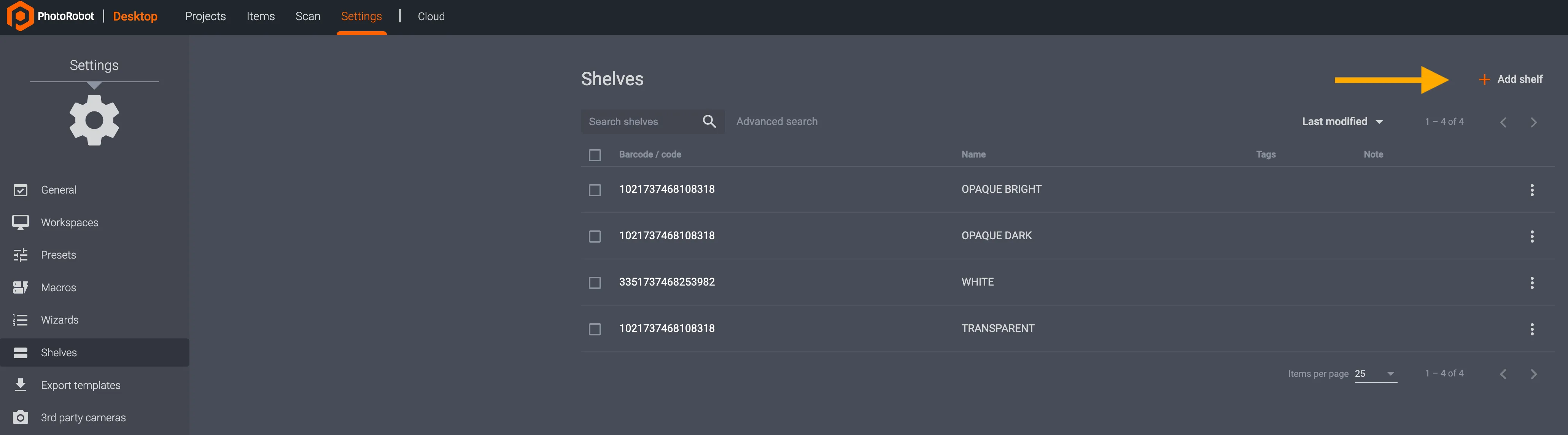
CAPP에서 선반 설정에 액세스하려면 앱의 로컬 또는 클라우드 버전에서 설정을 엽니다.
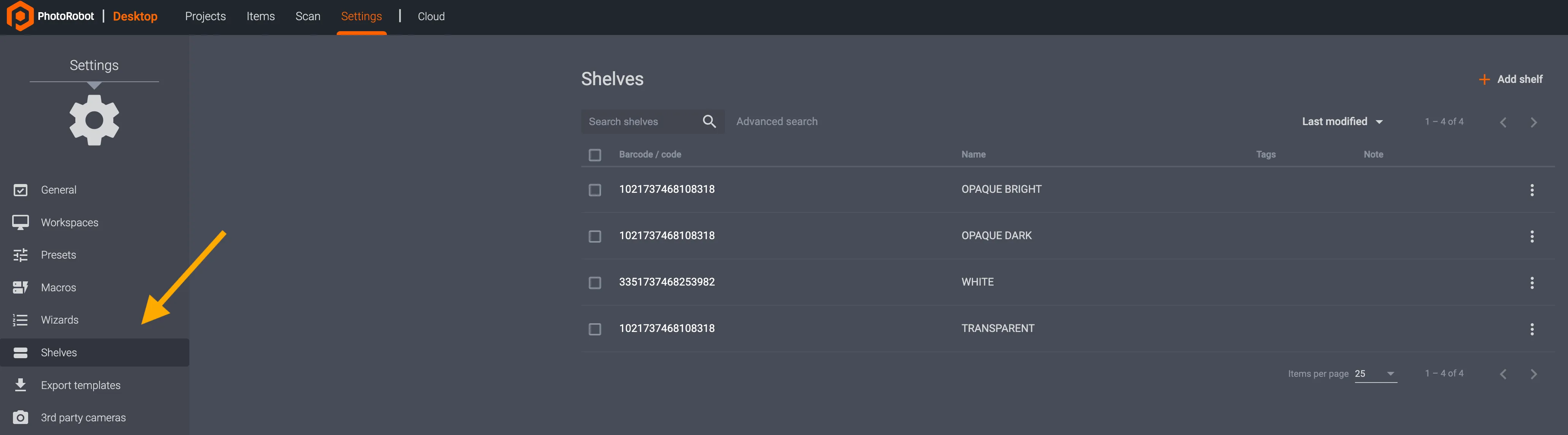
- Settings 인터페이스의 왼쪽에 있는 Shelves 메뉴 항목을 클릭하여 저장된 선반(있는 경우)을 봅니다.
- 고급 검색을 통해 선반을 검색하거나 선반 바코드/코드 왼쪽에 있는 상자를 통해 선반을 선택합니다.
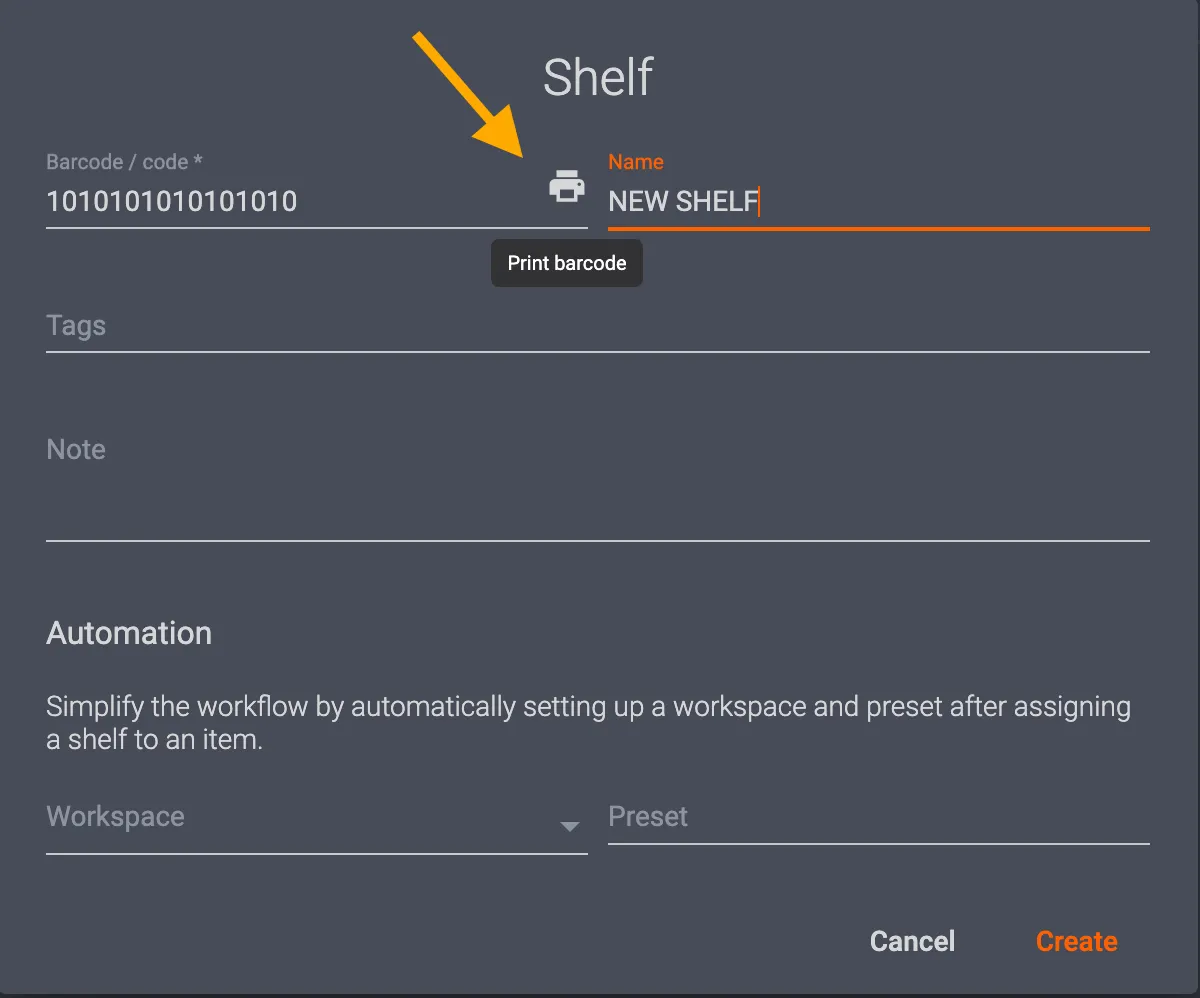
새 선반을 만들려면 선반 메뉴의 오른쪽 상단 모서리에 있는 + 선반 추가 를 사용합니다.
그런 다음 새 선반 설정을 통해 바코드 리더, 이름 생성, 태그, 메모, 작업 공간 및 사전 설정 선택과 함께 사용할 사용자 정의 바코드/코드를 생성할 수 있습니다.
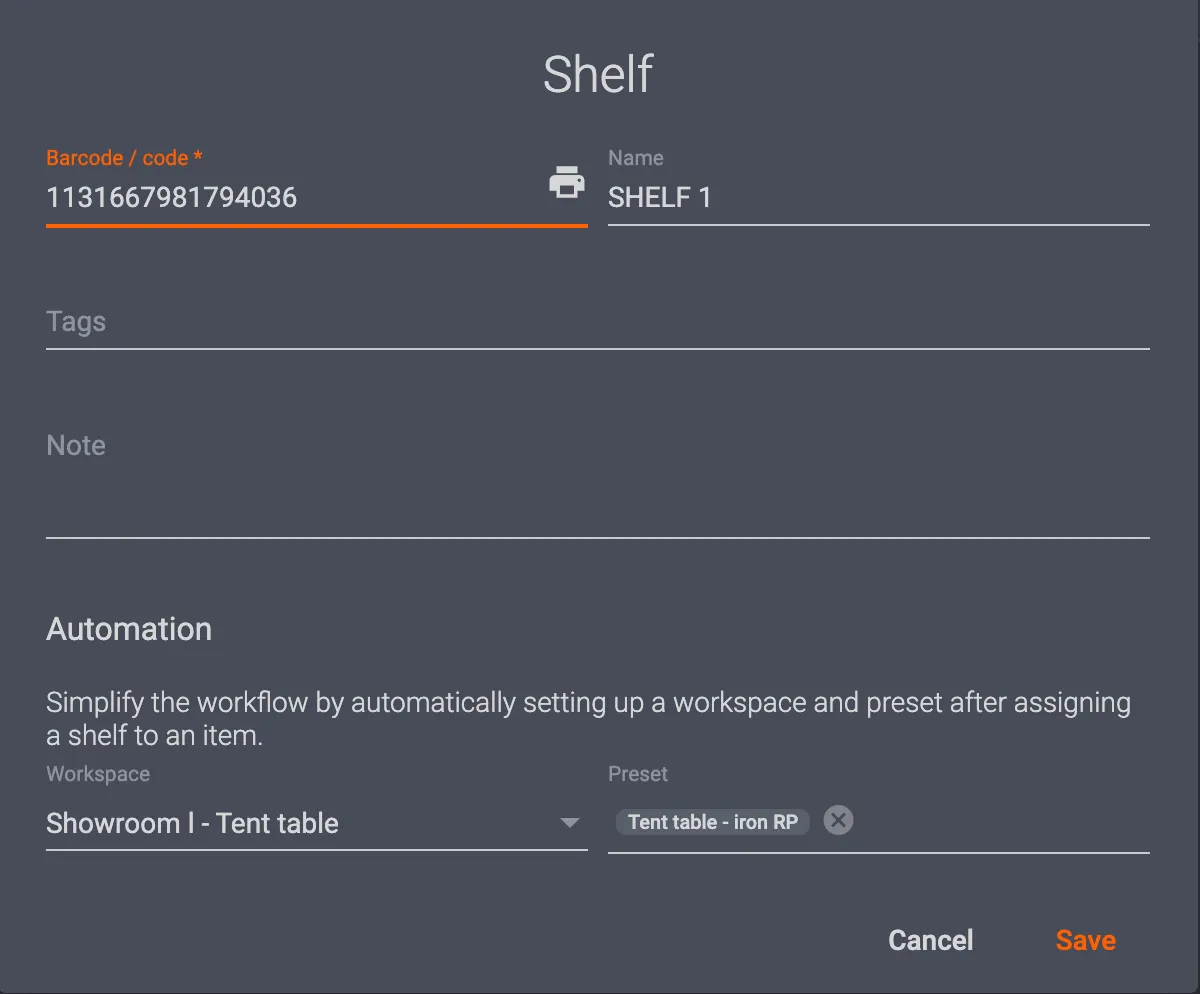
- 바코드/코드는 시스템이 바코드 리더를 통해 설정을 할당하는 데 사용할 수 있는 고유한 선반 코드를 생성하도록 사용자 정의할 수 있습니다.
- 이름은 종종 촬영되는 물체의 유형을 구별하는 데 사용됩니다(예: 소형, 중형 및 대형 품목). 신발, 대 보석, 의류 또는 이와 유사한 유형의 물체.
- 그런 다음 작업 공간 및 사전 설정 필드는 로봇 워크스테이션(및 스튜디오에서의 위치)에 의해 구성되고 선반의 자동 캡처 및 후처리 설정을 위한 사전 설정 필드로 구성됩니다.
- 인터페이스의 오른쪽 하단 모서리에 저장하면 앱 또는 바코드 리더를 통해 나중에 할당할 수 있도록 시스템에 선반을 생성합니다.
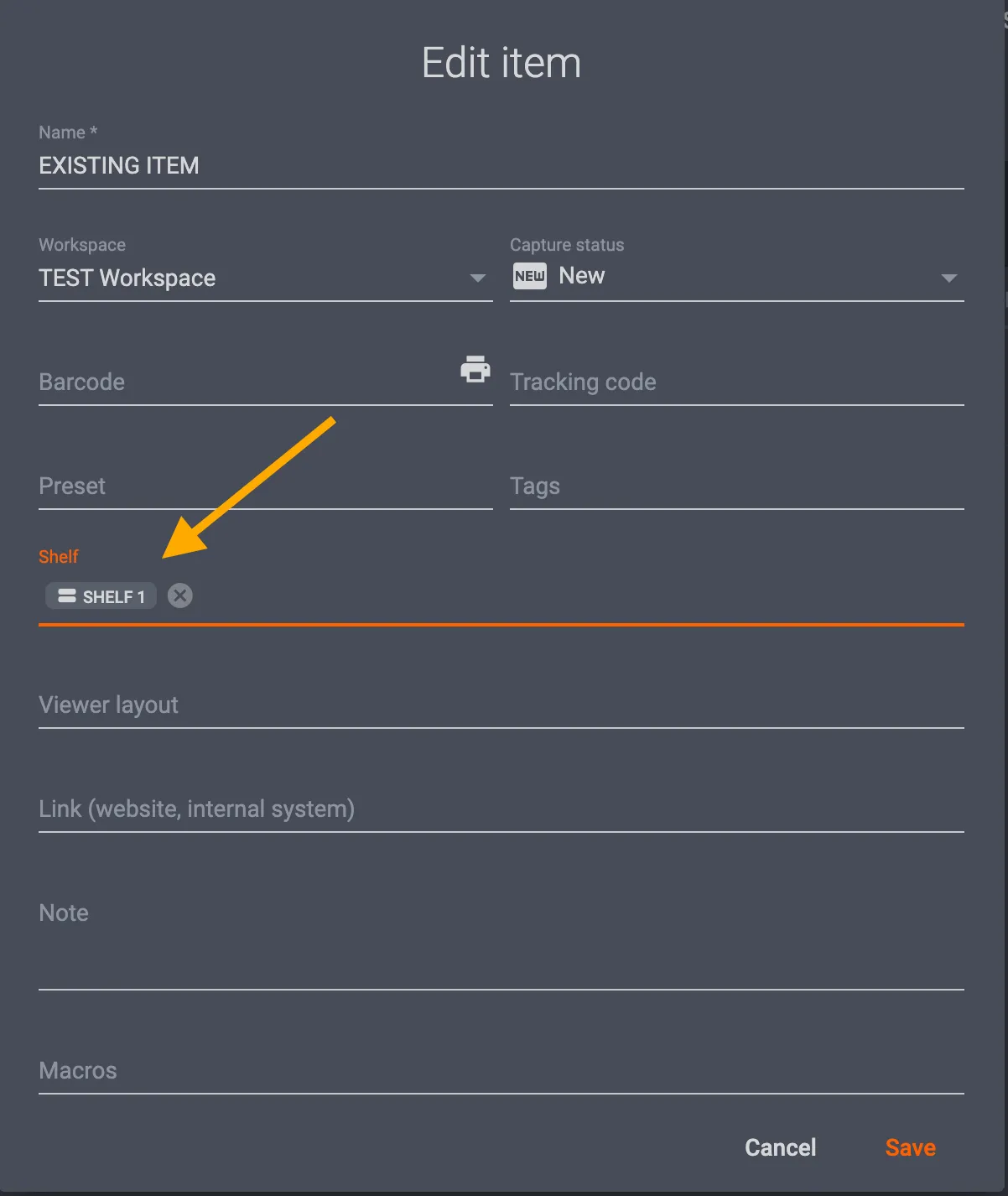
나중에 앱의 새 항목 또는 기존 항목에 선반 코드를 할당하려면 항목 설정 메뉴에서 선반 필드를 선택하고 선반을 선택하여 항목에 할당합니다.
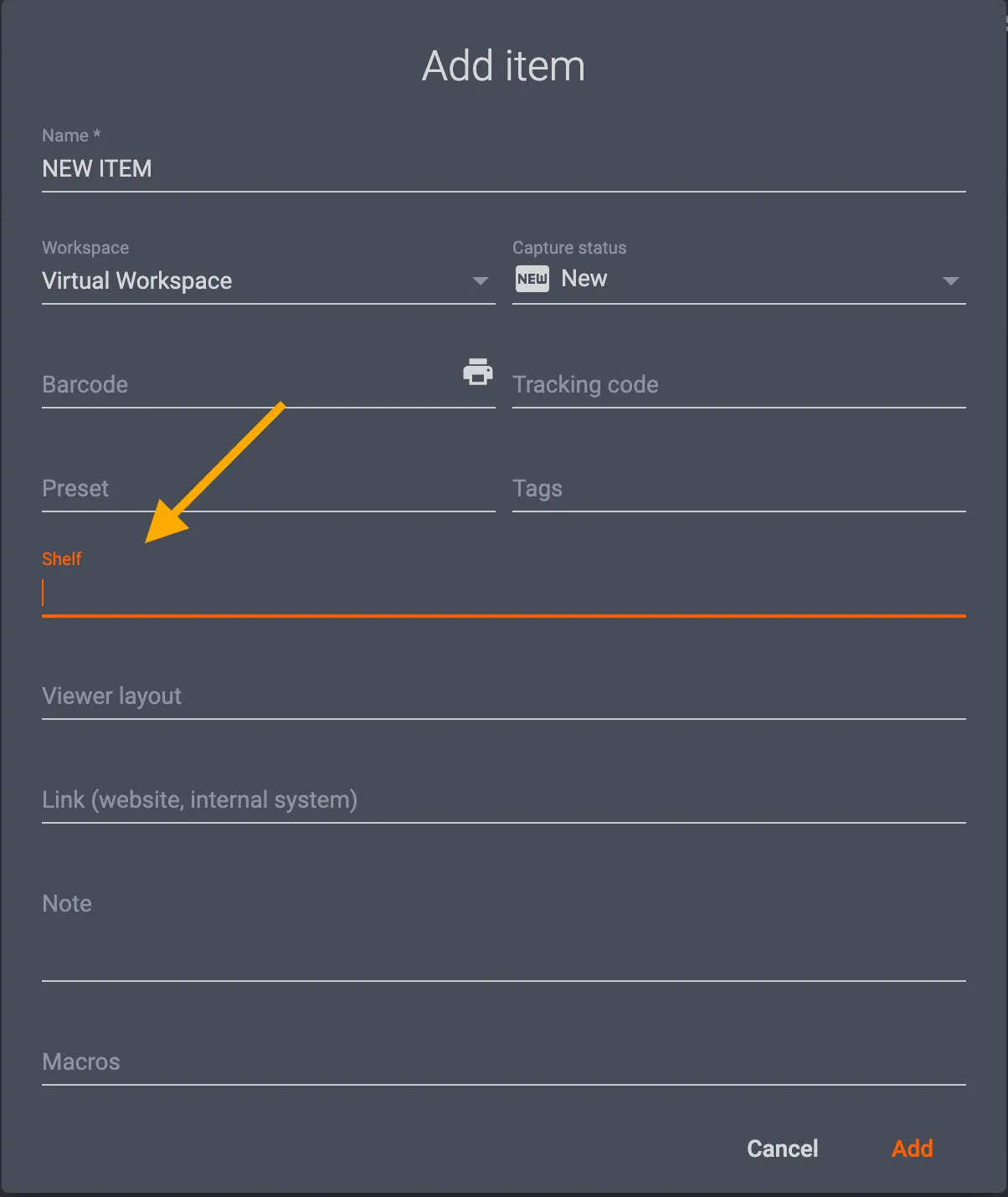
참고: 이 프로세스는 시스템에서 캡처하기 위해 기존 항목에 Shelf를 적용하는 것과 동일합니다. 항목 설정을 선택하고 Shelf 필드를 구성하기만 하면 됩니다.
또는 통합 바코드 리더를 사용하는 경우 고유한 선반 코드를 인쇄하고 품목 바코드와 함께 사용하여 워크스테이션 및 사전 설정별로 제품 및 촬영 목록을 빠르게 구성할 수 있습니다.

설정 범위 작업 추가
기본적으로 설정 범위를 구성하면 캡처된 이미지를 저장할 폴더, 캡처할 프레임 및 캡처 프로세스에 대한 설정이 시스템에 지시됩니다. 스코프 설정에는 시퀀스 구성(일반 및 패스트 샷 모드), 로봇 속도, 카메라 설정, 조명 제어 및 사전 정의된 편집 작업도 포함됩니다.
항목을 촬영하기 전에 사용자는 시스템에서 사전 설정을 만들거나 할당합니다. 사전 설정의 설정은 전체 폴더, 특정 항목 또는 개별 행과 프레임(편집 모드)에 적용할 수 있습니다.
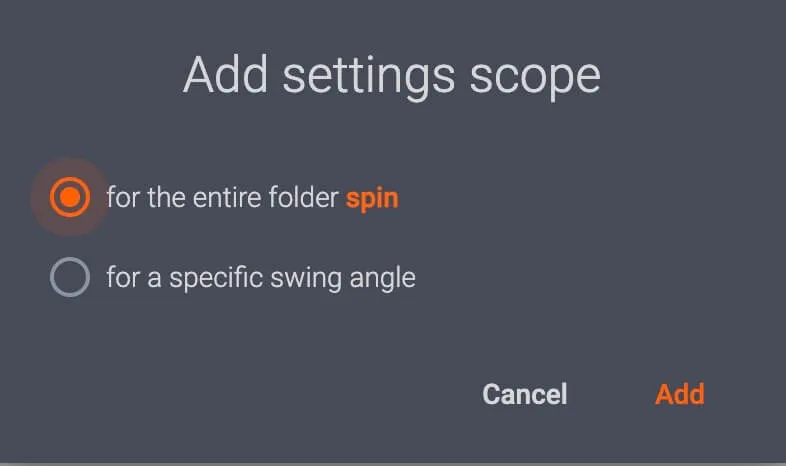
- 전체 폴더 스핀, 특정 스윙 각도 또는 현재 이미지만(편집 모드만 해당)에 대한 설정 범위를 선택합니다.
- 각 설정 범위에는 하드웨어 구성, 캡처 설정 및 하나 이상의 편집 작업이 포함됩니다.
특정 스윙 각도에 대한 설정 범위 추가
특정 스윙 각도에 대한 스코프 설정을 적용하는 경우 캡처 사전 설정이 적용될 각도(예: 15°, 45° 등)를 지정합니다.
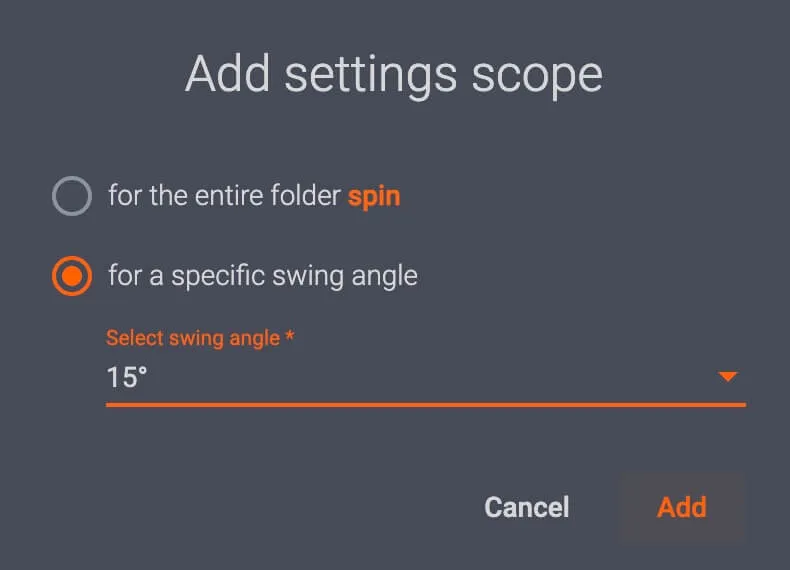
- 설정 범위는 스윙 각도 선택을 통해 하나 이상의 스윙 각도에 적용할 수 있습니다. 스윙 각도를 지정하고 추가를 클릭하여 폴더에 스코프 설정을 할당합니다.
- 할당된 사전 설정이 있는 대상 폴더가 인터페이스의 오른쪽 상단에 표시됩니다.
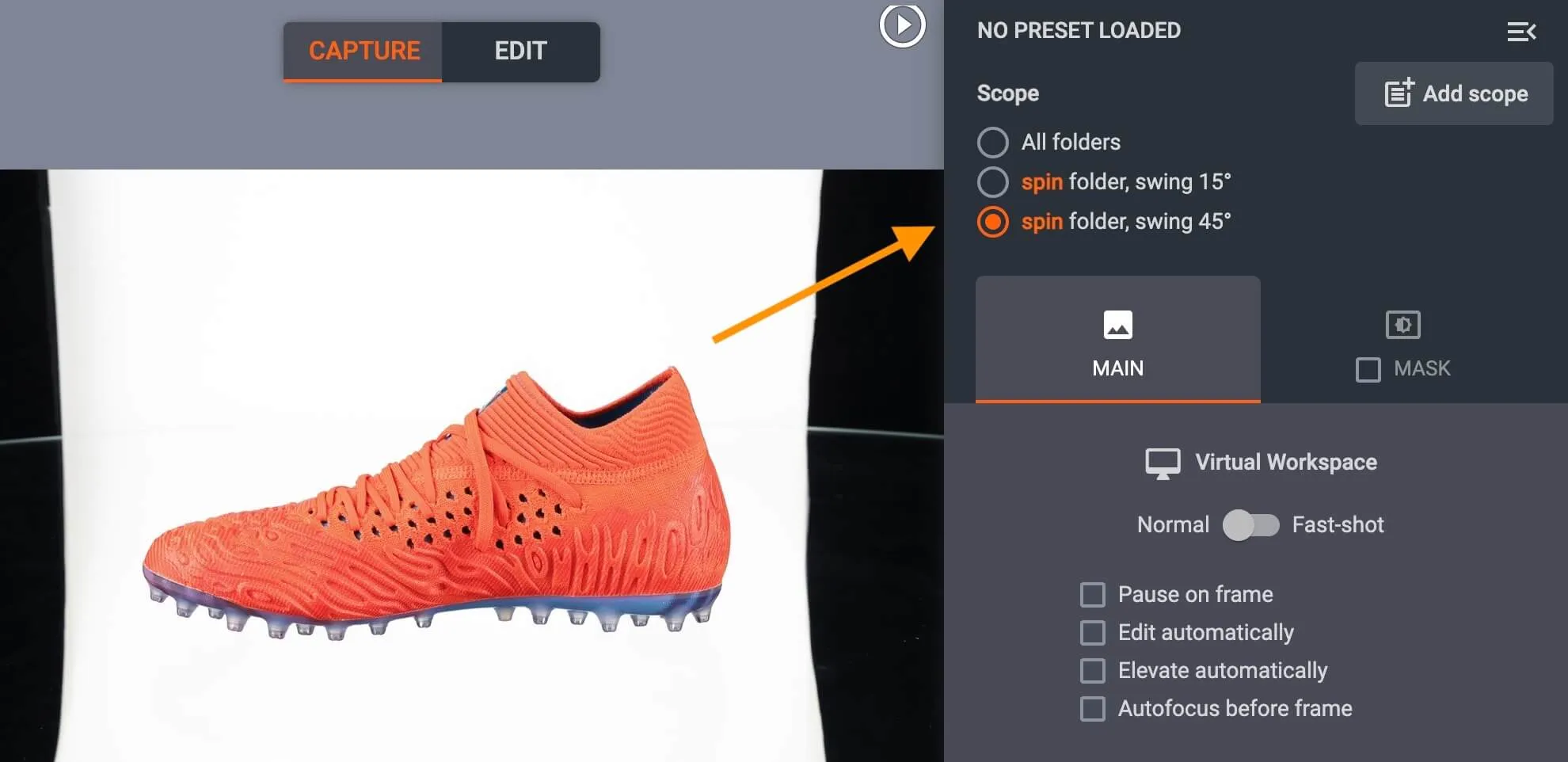
여러 스윙 각도에 서로 다른 범위 설정을 적용하는 경우 특정 스윙 각도를 클릭하여 해당 폴더에 할당된 설정을 보거나 구성합니다.
- 예를 들어, 스윙 각도 15°의 스핀 폴더에는 저강도 조명을, 스윙 각도 45°에서는 스핀 폴더에 대해 고강도 조명을 구성할 수 있습니다.
- 사용자는 스틸 이미지 폴더 또는 항목 내의 다른 폴더에 설정 범위를 추가할 수도 있습니다.
- 그러면 시스템이 이미지를 캡처할 때 설정 범위를 자동으로 적용합니다.
모든 이미지에서 설정 범위를 보거나 구성하려면 모든 폴더를 클릭합니다. 설정 범위를 구성한 후 시작 버튼을 클릭하면 할당된 사전 설정으로 캡처 프로세스가 시작됩니다.
또한 편집이 자동으로 구성된 경우 시스템은 사진을 캡처하고 시작 버튼을 클릭한 후 미리 정의된 편집 작업을 자동으로 적용합니다.
( ! ) - 모든 편집 작업 및 해당 기능에 대한 자세한 내용은 PhotoRobot 사용자 지원 설명서 - 이미지 편집을 참조하십시오.
매크로 기능 및 구성
CAPP의 매크로를 사용하면 항목 및 해당 폴더(스핀, 스틸 등)의 캡처 프로세스에 대한 명령을 정의할 수 있습니다. 명령은 개별 또는 여러 폴더에 적용하고, 시퀀스, 이미지 편집, 작업 영역, 사전 설정, 이미지 설정 복사 및 이미지 설정 이동에 적용할 수 있습니다. 사용자는 이름, 바코드, 태그 또는 메모별로 매크로를 추가로 사용자 지정할 수도 있습니다.
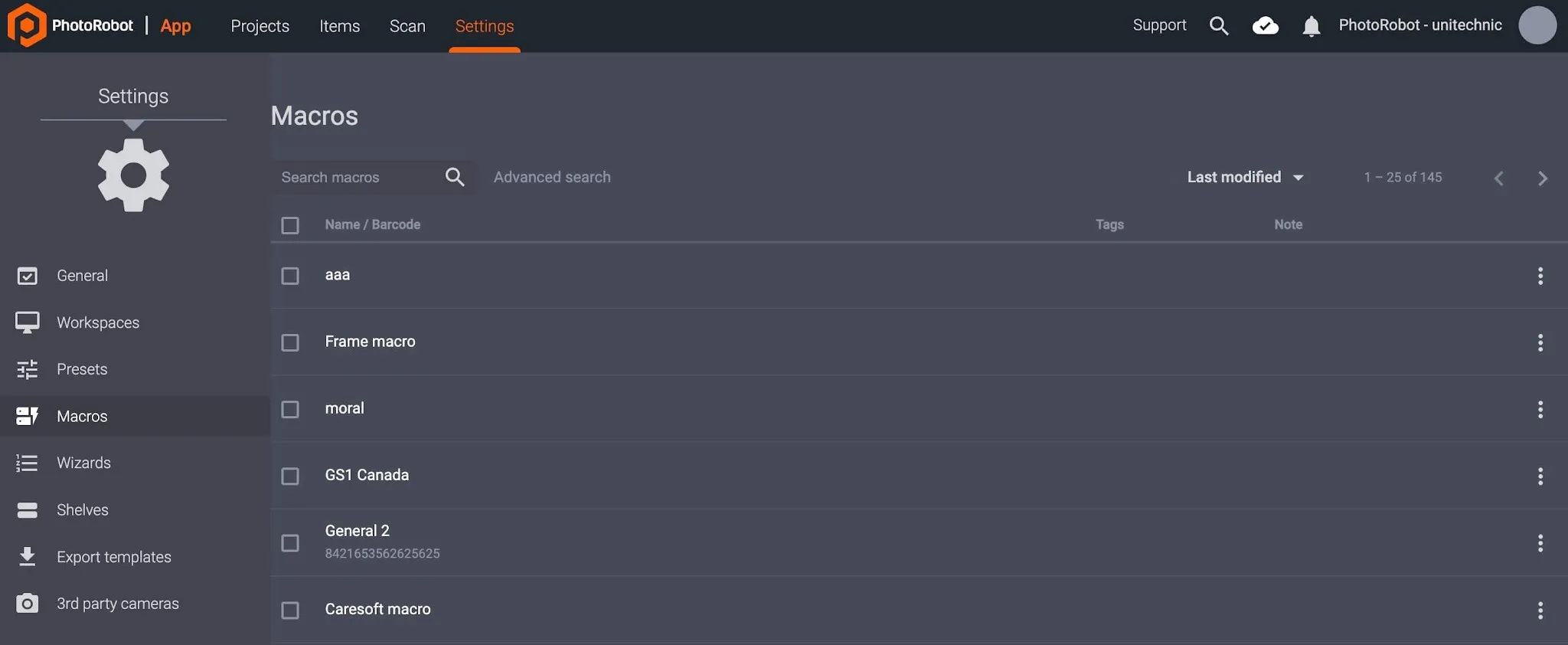
참고: PhotoRobot Macros의 구성 및 사용에 대한 자세한 지침은 PhotoRobot Macros 사용자 가이드를 참조하십시오. 매크로가 여러 폴더 및 구성 요소에서 사진 자동화 마법을 어떻게 가능하게 하고 복잡한 작업을 자동으로 처리하는지 알아보십시오.
PhotoRobot 마법사 모드
CAPP의 Wizards 모드는 수동 하드웨어, 카메라 및 시퀀스 구성에 대한 대안으로 작동합니다. 사용 시 Wizards 모드는 관리자 또는 사진가가 생산 라인 작업자를 위한 캡처 모드를 단순화하기 위해 다양한 Wizards를 생성할 수 있도록 합니다. 그러면 작업자는 Wizards 모드에서 CAPP를 시작할 수 있으며, 이는 마법사 안내 단계가 있는 매우 간단한 인터페이스로 작동합니다. 또한 사용 편의성 및 온보딩을 위한 제한된 Controls도 있습니다.
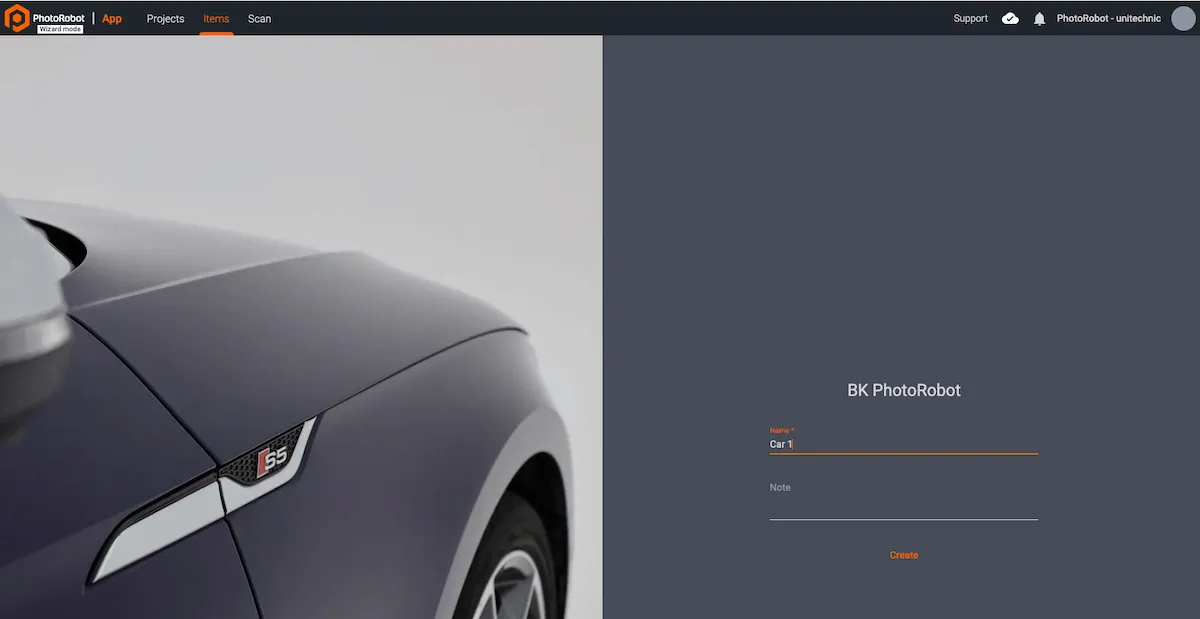
마법사를 생성한 후, 프리셋 및 작업 공간 구성과 함께 작업자가 따라야 하는 사전 정의된 단계를 저장합니다. 작업자는 어떤 설정도 조정할 수 없으며, 다음 프로세스로 이동하기 전에 각 단계의 지침을 완료해야 합니다.
참고: 마법사 단계는 JavaScript와 유사한 언어 형식으로 정의되며, PhotoRobot 컨설턴트가 사용자 지정 기능을 위해 스크립팅합니다. 사용자는 초기 실험 또는 간단한 설정을 위해 기본 기능을 스크립팅할 수도 있습니다. 마법사의 기술 구성 및 운영자 사용에 대한 문서는 PhotoRobot 마법사 모드 사용자 설명서를 참조하십시오.


EOS Rebel 시리즈


EOS DSLR 시리즈


EOS M 미러리스 시리즈


PowerShot 시리즈


클로즈업 / 핸드헬드

Canon EOS Rebel 시리즈는 견고한 이미지 품질, 직관적인 컨트롤 및 다양한 기능을 갖춘 초보자용 DSLR 카메라를 제공합니다. 사진 애호가에게 이상적인 이 카메라는 안정적인 자동 초점, 가변 각도 터치스크린, Full HD 또는 4K 비디오 녹화를 제공합니다.
연결
해상도 (MP)
해상도
Canon EOS DSLR 시리즈는 고품질 이미지, 빠른 자동 초점 및 다재다능함을 제공하여 사진 및 비디오 제작 모두에 이상적입니다.
연결
해상도 (MP)
해상도
Canon EOS M 미러리스 시리즈는 컴팩트한 디자인과 DSLR과 같은 성능을 결합합니다. 교체 가능한 렌즈, 빠른 자동 초점 및 고품질 이미지 센서를 특징으로 하는 이 카메라는 이미지 품질을 희생하지 않고 휴대성을 찾는 여행자와 콘텐츠 제작자에게 적합합니다.
연결
해상도 (MP)
해상도
Canon PowerShot 시리즈는 캐주얼 촬영자와 애호가를 위한 작고 사용자 친화적인 카메라를 제공합니다. 간단한 포인트 앤 슛(point-and-shoot)부터 고급 줌 카메라까지 다양한 모델을 통해 편의성, 견고한 화질, 손떨림 보정 및 4K 비디오와 같은 기능을 제공합니다.
연결
해상도 (MP)
해상도
Canon Close-Up & Handheld Cameras는 상세하고 근접한 사진 및 비디오를 위해 설계되었습니다. 컴팩트하고 사용하기 쉬우며 정밀 초점, 고해상도 이미징 및 다양한 매크로 기능을 제공하여 브이로그, 제품 사진 및 창의적인 클로즈업에 적합합니다.


